Wer Nullpunktgenauigkeit mit hall sensoren machen will lernt etwas.
Statt shunt kann man auch die VAC Stromwandler nehmen. Die haben keine Hall drin.
Wer Nullpunktgenauigkeit mit hall sensoren machen will lernt etwas.
Statt shunt kann man auch die VAC Stromwandler nehmen. Die haben keine Hall drin.
Vor allem über das Erdmagnetfeld und seine Ausrichtung zum Sensor.
Vakuumschmelze hat sich vor längerer Zeit aus dem Geschäft mit Ferriten im Zuge der ISDN Stillegung zurückgezogen, steigt wegen der Elektromobilität zuletzt aber wieder verstärkt ein.
In Sachen Protokolle scheint sich bei Akkus auch etwas zu tun. Das neue Venus 3.70 kann bei einigen Pylons über CAN ein FW Update fahren. Das Victron eigene Lynx BMS kommuniziert Spannungen der Einzelzellen über CAN und neben NMEA2000 wurde jetzt auch CanOpen implementiert. CanOpen ist sehr gut dokumentiert, zieht alle Hardware Register der CAN Chips wie von deren Entwickler im Bus Design vorgesehen und ist deshalb auch relativ einfach als Firmware zu implementieren. Es funktioniert insbesondere beim Ein und Ausstecken von Busteilnehmern automatisch gut, was man von den Pylons nicht wirklich behaupten kann. Man könnte sich damit also beide Seiten selbst schreiben und alle bislang zur Visualisierung vermissten Features implementieren.
Freilich funktioniert das dann nur für Victron aber Victron und Pylontech waren bislang immer der Vorreiter welcher von anderen Marktbegleitern als kompatibel nachgebaut wurde.
Wer hat dir denn das erzählt?
Da gibt es keinen Einfluss.
PS: könnte sein, dass Hall Wandler damit ein Problem haben. Die von der VAC nicht.
Ich stelle mir garnichts vor. Ich würde das als Zusammenarbeit mit allen gemeinsam definieren.
Ich kenne nur Verbrauch von 0,1 mA Ruhezustand, 1 mA im aufgeweckten Betrieb und 5 mA für den BT Adapter dabei. Es würde mich wundern, wenn man Auflösung und Nullpunktgenauigkeit so weit treiben kann für BMS >50 A. Da ist man bei 0,1 %.
Wie sind denn die Eigenverbräuche der BMS ?
Und wie ist es mit dem Eigenverbrauch des Zählers selbst?
Diese sehe ich weniger problematisch als die Balancing Verluste. Es gibt angeblich bei ??? eine FIrmware, die quasi ständig (auch bei zB 3.3V) balanziert und Leistung verbrennt. Da tut sich natürlich jede externe Messung schwer. BMS und Eigenverbrauch wären dem entgegen ja konstant und bekannt.
Ich hatte eigentlich gehofft, das in den letzten 2 Jahren hier an mehreren Beispielen bereits verdeutlicht zu haben.
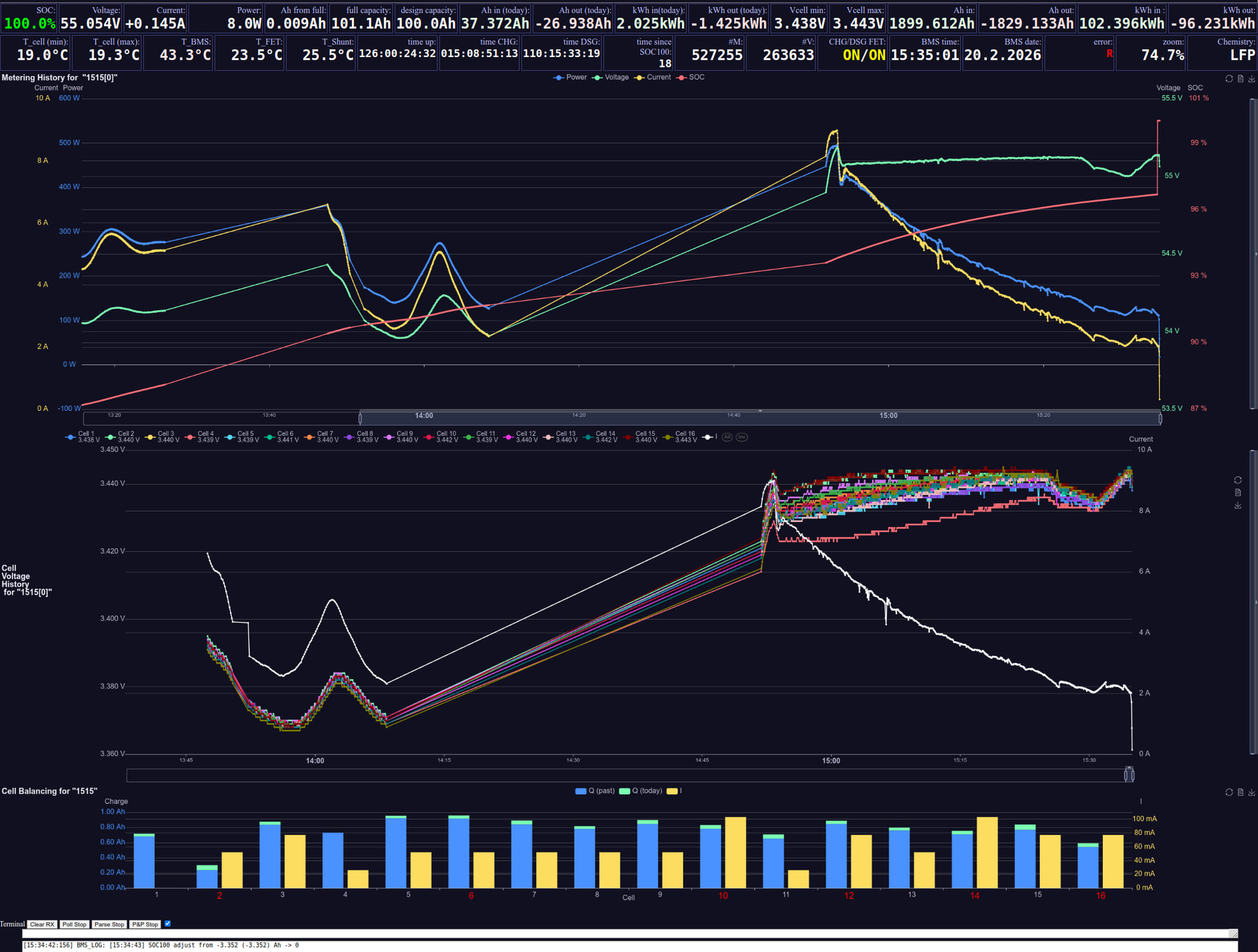
Hier noch einmal zwei aktuelle Beispiele ( 150 A BMS Klasse , ~290 µOhm Shunt ): 100% SOC-Rekalibrierung nach ~ 90 Tagen.
-3.352 Ah bzw. -1.46 Ah Abweichung. Wenn man den Fehler komplett dem Nullpunktfehler zuordnet, wären das etwa 1.5 mA bzw. 0.7 mA.
Der ware Fehler ist aber schon deswegen deutlich kleiner, weil fast 50 % des Fehlers damit zusammenhängen, dass durch minimalen “Memory-Effect” die erste Vollladungsspannungskurve nach dem Winter etwas nach oben verschoben ist, was sich an den folgenden Tagen dann in einer Korrektur des SOC100 Punktes in die anderen Richtung ( um zusammen ~ 1.4 Ah bzw. ~ 1.0 Ah ) gezeigt hat.
Man sieht außerdem, wie wenig Balancing-Bedarf nach 90 Tagen vorhanden ist.
Bei meinen BMS der 100A Klasse ( ~400 µOhm Shunt ) habe ich typische Nullpunktfehler von deutlich < ±1 mA
Meine aktuelle BMS HW liegt bei ~ 4/5 mA bei 54 V ( ohne/mit BT, ohne aktives CAN, ohne Display ).
Da ist aber noch Luft nach unten. Wenn ich die Zeit für die Optimierung finde, könnte die nächste Generation eher bei der Hälfte liegen.
Im “Deep-Sleep” sind es < 100 uA.
Auf die eigentliche Coulomb-Counting HW dürfte < 300 uA entfallen.
Da ich bei meinem BMS ziemlich genau weiß, wie viele mAh gebalanced wurden, könnte ich das relativ einfach kompensieren ( steht noch auf der TODO-Liste, da ich im Moment nur einen Pack habe, bei dem die 20 Ah pro Jahr ein dominierender Fehler sind )
Da können je nach Betriebmodus ( BT, CAN, Display, möglicherweise Relais … ) schon nennenswerte Unterschiede entstehen,
Wow! Ich hatte das nicht mehr im Kopf, dass das so gut war! Damit hat man ggf ein Argument, warum man selbst baut: ich weiss nicht, ob man den Victron direkt an der Batterie nehmen kann. Btw, misst du im plusdsr im massezweig?
Was überhaupt keinen Sinn macht. Wo stammt diese Info her?
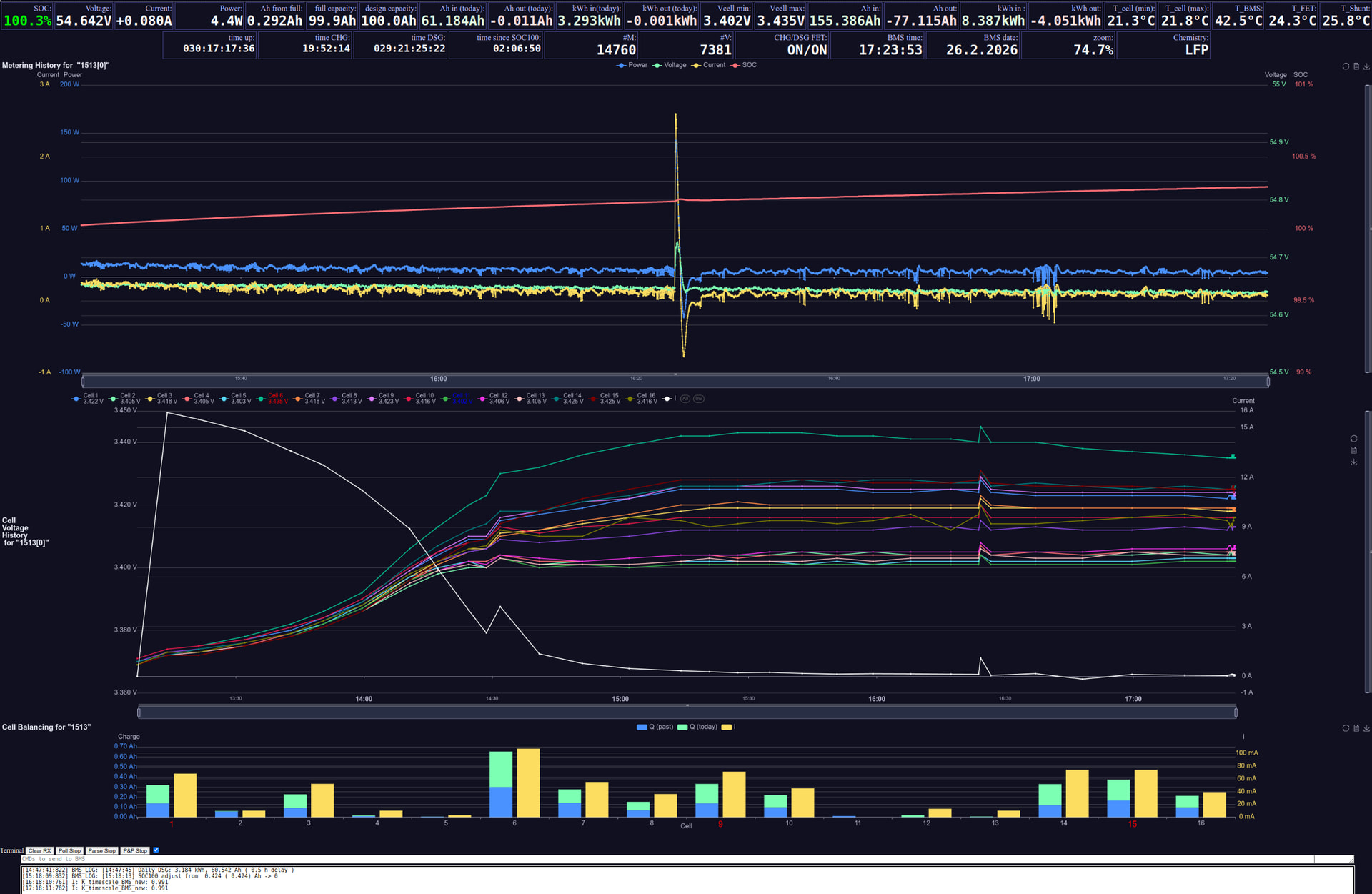
Ich habe in den letzten Tagen selber einen neuen Pack in Betrieb genommen. Deswegen kann ich ein konkretes Beispiel für den initialen Balancing-Prozess geben:
Am ersten Tag ist der Pack relativ spät voll geworden, so dass nur ~ 2h Stunden fürs Balancing blieben. Obwohl > 200 mAh gebalanced wurden, scheinen die Spannungen eher noch auseinanderzulaufen.
Es ist auch bemerkenswert wieviel Ladung die Zellen hier beim ersten Volladen noch nach Erreichen von 3.42 V ziehen, nämlich > 9 Ah. Das verändert sich an den Folgetagen deutlich.
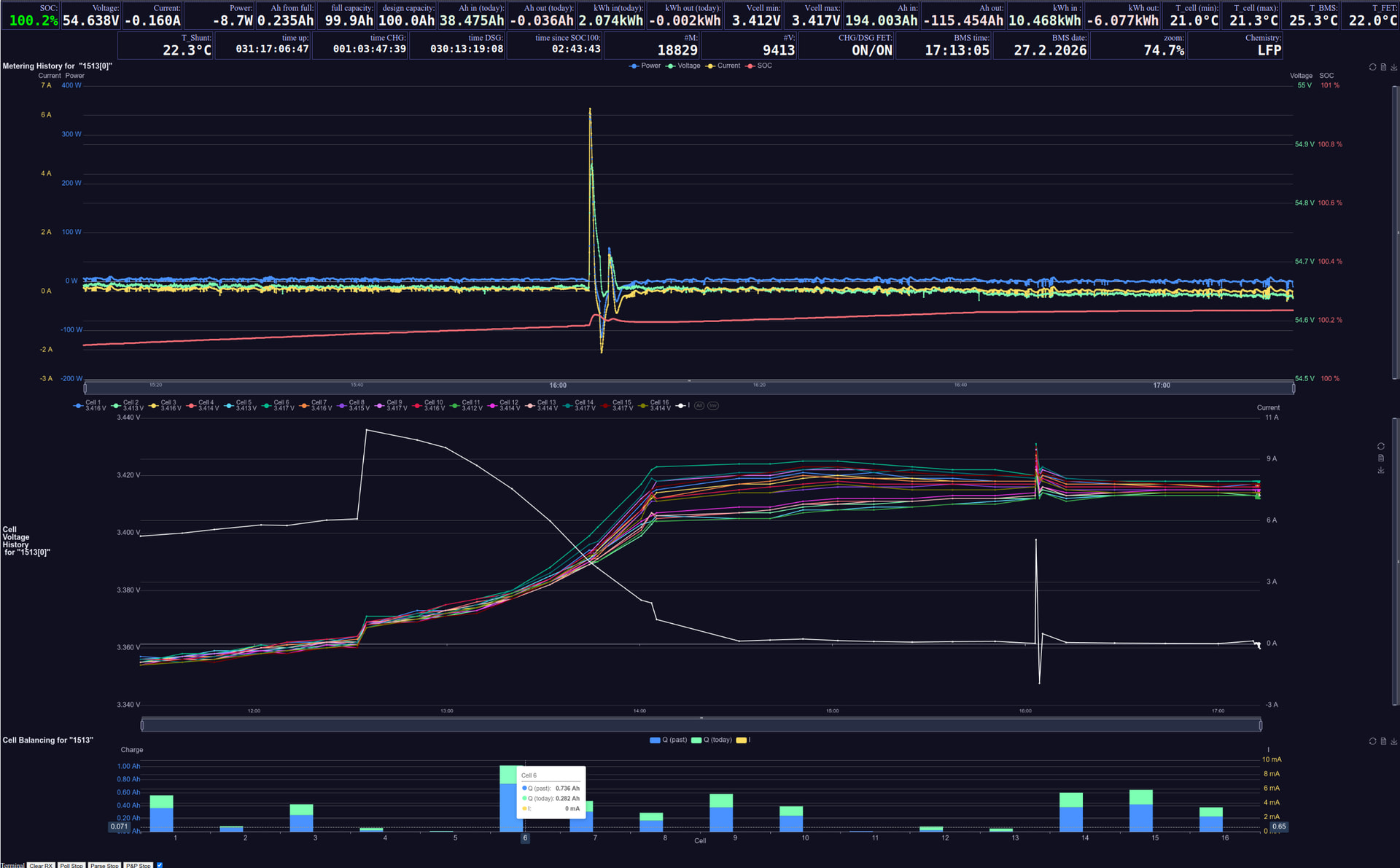
Auch am zweiten Tag scheinen die Zellen erst noch auseinanderzulaufen, erst irgendwo zwischen 15:30 und 16:00 verändert sich dies.
Hier nehmen die Zellen über 3.42 V nur noch < 1 Ah auf. Es zeigt sich also eine starke Hysterese in der Ladespannungskurve ( also letztendlich ein Memory-Effect)
Heute war es dann endlich vollbracht und die Zellen auf 5 mV zusammen.
Der vollsten Zelle mußten dabei insgesamt > 1 Ah entnommen werden.
Stammt aus diesem thread aus dem PV-Forum. Dort nennen sie mich BYD-basher jtzt lasse ich die lieber in Ruhe ![]()
Ja, so kenne ich die ……Spezialisten da drüben. Da ist ja YT noch besser… ( und davon halte ich garnichts).
Ich kann da garnicht länger lesen, kriege sofort Koliken und Augenkrebs.
Warum tust du dir das an?
Wir kapern diesen Thread ein wenig aber es passt ja insofern ganz gut, als daß man sieht, wie gut das AHED BMS im Vergleich zu kommerziellen Produkten funktioniert. Die schieben eine Firmware nach der anderen heraus ohne die offenbar bestehenden Probleme wirklich lösen zu können. Bin dort gelandet weil mich “balancing-Strategien” angesprochen hat ![]()
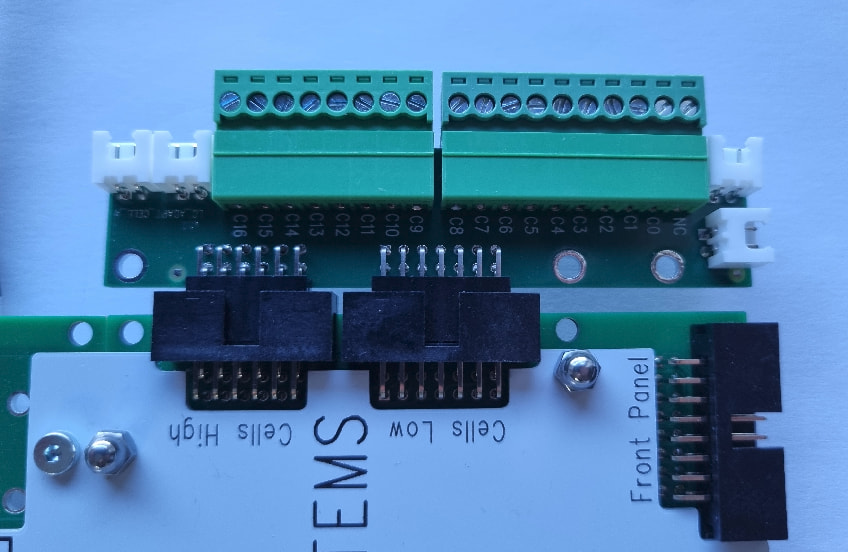
Die neuere HW-Generation ist mit den zwei 2.54 mm Stiftleistung, auf die die 17 Zellmessleitungen und 4 Zelltemperaturmesskanäle verteilt sind, auf ein bestimmtes Packdesign optimiert und dürfte für die meisten so nur unbequem nutzbar sein. Um nicht schon wieder eine zusätzliche Version ableiten zu müssen, habe ich kürzlich eine Adapter-Platine ergänzt, die das auf vier 2-polige XH-Stecker ( die oft für 10k NTC verwendet werden ) und zwei 8 bzw. 10-polige steckbare Klemmleisten umsetzt.
Damit sollte man dann ohne gecrimpte “Spezialkabel” einen Pack anschließen können.
Die neue Display-Einheit sieht so aus
oder hinter Blech
Mit dem eigentlichen BMS wird die Display-Einheit über ein einziges Flachbandkabel verbunden.
Für den CAN BUS gibt es die beiden rechten RJ45-Buchsen, so dass dann einfach Patchkabel verwendet werden kann. Die Belegung entspricht der von DEYE, so das man auch direkt mit einem Patchkabel einen DEYE anschließen kann.
Die filigranen PH-Kontakte ( von denen ich inzwischen > 1200 von Hand gecrimpt habe ) und Spezialkabel haben sich damit hoffentlich weitestgehend erledigt.