Hängt von der Konfiguration ab, die hat hier aber noch niemand gepostet glaube ich. Den Link zum Google Drive mit der China-Software gibt’s hier im Thread. Vielleicht muss/sollte man da ein paar Einstellungen optimieren, vielleicht auch bezüglich des Balancings.
Sorry bin gerade mit Umbau im Haus beschäftigt , zudem bekomme ich nicht immer mit wenn’s neue Nachrichten gibt . Gibt es noch offene Punkte die ich anpassen muss ? Aber habe gesehen das fleißig weiter gemacht worden ist ![]()
Voll laden ist bei meinem Akkus selbst mit relativ geringem Strom nicht möglich. Oberhalb von 50V fangen die Zellen plötzlich an heftig zu driften. Vorher lag die Zelldrift be 4mv/7mv.

Kann mich bis jetzt nicht beschweren, bis jetzt sind alle 10 Batterien unauffällig. Hab aber auch noch kein Top Balancing gemacht. Lade gerade alle Zellen bis 3,420V auf, was ca. 97-100% SOC laut BMS wäre. Der Zelldrift ging nie über 0,020V bei 6,3A Ladestrom. Hab aktuell noch keine Möglichkeit die Batterien zu entladen, deswegen will ich sie noch nicht ganz voll Laden.
Die Batterien standen aber auch schon 2 Wochen mit eingeschaltetem BMS rum, vielleicht wurde in der Zeit schon einiges balanciert.
Hallo Atomi23,
bin leider noch nicht erfolgreich mit der CAN Seite am Victron GX gewesen. Gibt es Erfahrungen mit dem LilyGo T-CAN485? Die RS485 Seite funktioniert anstandslos. Kriege aber leider den CAN Bus nicht ans laufen.
Viele Grüße und danke für Deine Entwicklung!
Hi,
danke für das Feedback!
Ich habe zwar beide Boards hier liegen, stecke aber gerade komplett im Aufbau meiner eigenen Anlage drüben am Bungalow und ziehe Kabel. Daher komme ich im Moment leider nicht dazu, das Ganze live für dich nachzustellen und zu testen.
Eigentlich sollte der CAN-Bus problemlos laufen. Mein starker Verdacht: Dir fehlt die Terminierung. Beim LilyGo T-CAN485 ist auf der CAN-Seite kein 120-Ohm-Widerstand fest verbaut bzw. out-of-the-box aktiv. Gerade wenn dein Kabel zum Victron GX auch nur ein bisschen länger ist, bricht die Kommunikation ohne diesen Abschlusswiderstand sofort zusammen.
Was du testen solltest:
-
Klemme einfach mal händisch einen 120 Ohm Widerstand direkt am LilyGo zwischen CAN-H und CAN-L.
-
Stell sicher, dass der Victron GX am anderen Ende des Busses ebenfalls terminiert ist (in der Regel steckt man da einfach den beiliegenden blauen Victron-Terminator in den zweiten Port).
Probier das mal aus, das löst in den meisten Fällen genau dieses Problem.
Viele Grüße!
Nochmal zum Drift der Zellen. Ich werde ein BMS retournieren. Die Zelle 11 fällt bei Entladung schnell unter 2,8V und tiefer. Bei der Ladung kommt sie nicht hinterher - augenscheinlich läuft das Balancing der einzelnen Packs nicht gut. Bei dem aktuell sonnigen Wetter kommt die Zelle 11 des ersten Packs kaum über 3,35V. Zelle 14 war kurzfristig bei 3,7V. Ich habe die Ladezielspannung des MPPTs reduzieren müssen.
Denke auch darüber nach, aber das wären 4 von 10 bei mir. Balancing passiert gefühlt nicht. Nach mehreren Tagen kein millivolt besser. Ich hab jetzt wieder angefangen, den speicher zu nutzen und es fehlen so 25% der Kapazität. Schreib mal wie die retoure läuft.
Ich befürchte es wird mir sehr geringem Strom passiv balanciert.
Ich hatte aus der Ferne immer wieder das Ladegerät ein geschaltet und bei Zelle 6 > 3,6V aus geschaltet. (z.T. 300mv Drift) Nach einigen Stunden war die Drift jeweils erheblich geringer.(50mv)
Ich hatte dann zum Motorrad laden gut 1kw mit 20A verteilt auf meine 3 parallelen packs gezogen und mit der Sonne nachgeladen - nun setzte die drift an Zelle 6 später ein.
Ich werde versuchen die nächsten Tage die Spannung der Packs hoch zu halten, damit Top-balancing läuft.
Falls es klappen sollte, muss ich die Packs leer fahren. Dann darf nicht das Phänomen von waterkant auftreten.
Der Händler hat mir binnen 24h eine Ersatzbatterie geliefert.
1 „Gefällt mir“
Hallo,
der 120 Ohm Widerstand ist zwischen den Klemmen montiert, Der Terminatorwiderstand am Multiplus steckt. Keine Veränderung. Can Init Fehler…. Habe vorsichtshalber auch nochmal die CAN-H und CAN-L gedreht. Ist eigentlich Ground notwendig? Es steht auf optional? Welches Can Bus Profil ist im VE-Can port zu verwenden?
Viele Grüße!
@waterkant Ich wollte nochmal eine Rückmeldung geben, ob ich Deine Software verwenden konnte. Leider habe ich sie nicht zum Laufen bekommen. Das Flashen der .bin Datei an die Adresse 0x1 mit dem ESPressoFlash -Webflasher war zwar ohne Fehlermeldung durchgelaufen, anschließend hat das Waveshare Geräte aber so ca. im Sekundentakt neu gebootet. Kann es sein, dass der Bootloader nicht passt, denn die .bin Dateien von Atomi23 müssen an die Adresse 0x0 geflasht werden? Beim Versuch die Software über die Arduino-IDE einzuspielen, kam eine Fehlermeldung zu einer fehlenden Bootloader-Datei.
(Um das Waveshare Garät wieder zum Booten zu bringen, habe ich mit der Arduino-IDE temporär eine Waveshare WLAN-AP-Demo aufgespielt.) Aktuell läuft die aktuelle Software V2.02 von Atomi 23. Ich war begeistert, dass HomeAssistant gleich das fertig eingerichtete MQTT- Gerät gefunden hat. Leider hat der MQTT Datenstrom aber nur ca. 1h angehalten und ist dann wieder versiegt. Die Webseite “Topband V2.02 Master” funktioniert aber seit 6h tadellos.
Ich werden voraussichtlich in der kommenden Woche eine neue Version für das Waveshare RS485-CAN bzw. alle andere ESP32 mit 16MB Flash & 8MB PSRam veröffentlichen. Läuft hier schon seit einigen Tagen und bringt einige neue Features mit. Details dann hier.
Ich habe seit gestern den Cerbo mit dem Waveshare verbunden. Die Verbindung hat nach einem Neustart vom Waveshare direkt funktioniert. Bezüglich Einstellung im Cerbo ist “CAN-Bus BMS LV (500kbit/s)” die richtige Wahl. Can High ist die braun/weiße Ader, Can Low ist die braune Ader. Bei mir läuft alles auf dem VE.Can1 da dieser isoliert ist und ist mit dem mitgeliefertem Abschlusswiderstand terminiert. Auf der Waveshare Seite ist der 120Ohm Widerstand aktiviert.
Moin zusammen,
ich habe das TopBand BMS Gateway (u.a. für die EET Akkus) von Grund auf neu geschrieben; vom ursprünglichen Arduino-Sketch hin zu einer modularen ESP-IDF-Firmware für den ESP32-S3. Es liest TopBand-LiFePO4-Packs weiterhin über RS485 aus und stellt die Daten per CAN für Victron-/Pylontech-/SMA-Wechselrichter sowie für MQTT Broker (Home Assistant) bereit.
Die Version ist als Public Preview draußen – sie läuft bei mir produktiv an einem 3-Pack-System, ich gebe sie aber erstmal zum Testen und für Feedback frei, bevor ich die finale 3.0 tagge.
Was V3.0 kann:
-
Multi-Pack-Monitoring über RS485 (pro Pack und pro Zelle)
-
CAN-Anbindung für Victron, Pylontech und SMA
-
Batterie-Konfigurationsmodi (Auto / Auto mit Schutz-Margin / Manuell), wobei Auto den Live-Vorgaben des Packs folgt – inkl. temperaturabhängiger Entladestrom-Begrenzung
-
Web-Dashboard mit Live-Charts (u. a. Zell-Drift mit persistenter Historie), Energie-Tracking
-
MQTT mit Pro-Pack-/Pro-Zelle-Topics und Home-Assistant-Auto-Discovery
-
Benachrichtigungen über Telegram (neu)
-
OTA-Updates mit Selbsttest und automatischem Rollback
-
Konfig-Backup (Export/Import)
-
Board-Auswahl (Waveshare ESP32-S3-RS485-CAN als Preset, manuelle Pin-Konfig für andere geeignete S3-Boards)
Voraussetzungen: ESP32-S3 mit 16 MB Flash und 8 MB PSRAM. Klassische ESP32 oder S3-Boards ohne ausreichend PSRAM werden nicht unterstützt.
UI vorab ansehen (ohne Hardware, läuft im Browser):
https://swingstate.github.io/topband-bms-gateway/demo/
Download, Flash-Anleitung und vollständige Notes:
https://github.com/swingstate/topband-bms-gateway/releases/tag/v3.0.0-preview.1
Das Gateway ist reines Monitoring – das TopBand-RS485-Protokoll ist reverse-engineered und wird nur gelesen, es werden keine Parameter ins BMS geschrieben.
Es ist ein Preview, also nehmt euch ein System zum Beobachten, und prüft eure Grenzwerte selbst. Über Rückmeldungen, Bug-Reports und Erfahrungen mit anderen Setups freue ich mich auf Github.
Viele Grüße
3 „Gefällt mir“
Sehr cool. Meine Box hab ich auch mit ESP-IDF programmiert. Bin leider nicht dazu gekommen das was ich machen wollte fertig zu machen, vllt. kann man später die codebases zusammentun mit optionalen features, mein code setzt z.B ein display voraus und läuft auf einem ESP32C6.
1 „Gefällt mir“
Habe die V3.0 Preview in ein neues ESP32-S3-RS485-CAN eingespielt, angeschlossen - und was soll ich sagen –> es lief direkt! Vielen Dank für die Arbeit. Habe mal testweise die gleiche Version in die Lilygo Platine eingespielt - diese hat sich in endlos reboot loops aufgehängt.
Das UI gefällt mir sehr gut, erstaunlich schnell für den kleinen ESP Chip.
Update nach 1 Taq: Die Weboberfläche ist nicht mehr erreichbar, die CAN Seite läuft problemlos weiter
Hallo zusammen,
ich wollte mal ein Update zu meinen EET LiFePO4 48V (1,44kWh) Akkus dalassen, von denen ich mittlerweile 16 Stück seit letztem Jahr im Betrieb habe. Vielleicht erinnert sich der eine oder andere: Ich hatte damals zusammen mit atomi das ursprüngliche Tool auf GitHub aufgebaut (die Idee für den Waveshare ESP mit CAN und RS485 kam damals von mir ![]() ).
).
Nachdem ich das alte Tool jetzt knapp ein halbes Jahr ohne MQTT-Anbindung laufen hatte, bin ich vor 24 Stunden auf das neue Tool von Waterkant umgestiegen.
Mein Fazit zum Waterkant-Tool bisher:
-
Performance: Läuft deutlich schneller, flüssiger und bisher absolut zuverlässig. Echt top umgesetzt, danke an der Stelle für die Arbeit!
-
Installation: War anfangs ehrlich gesagt etwas "komisch" bzw. holprig (mit PowerShell, Python-Installation, ESP-Tool und dem Flashen), aber am Ende hat alles geklappt.
-
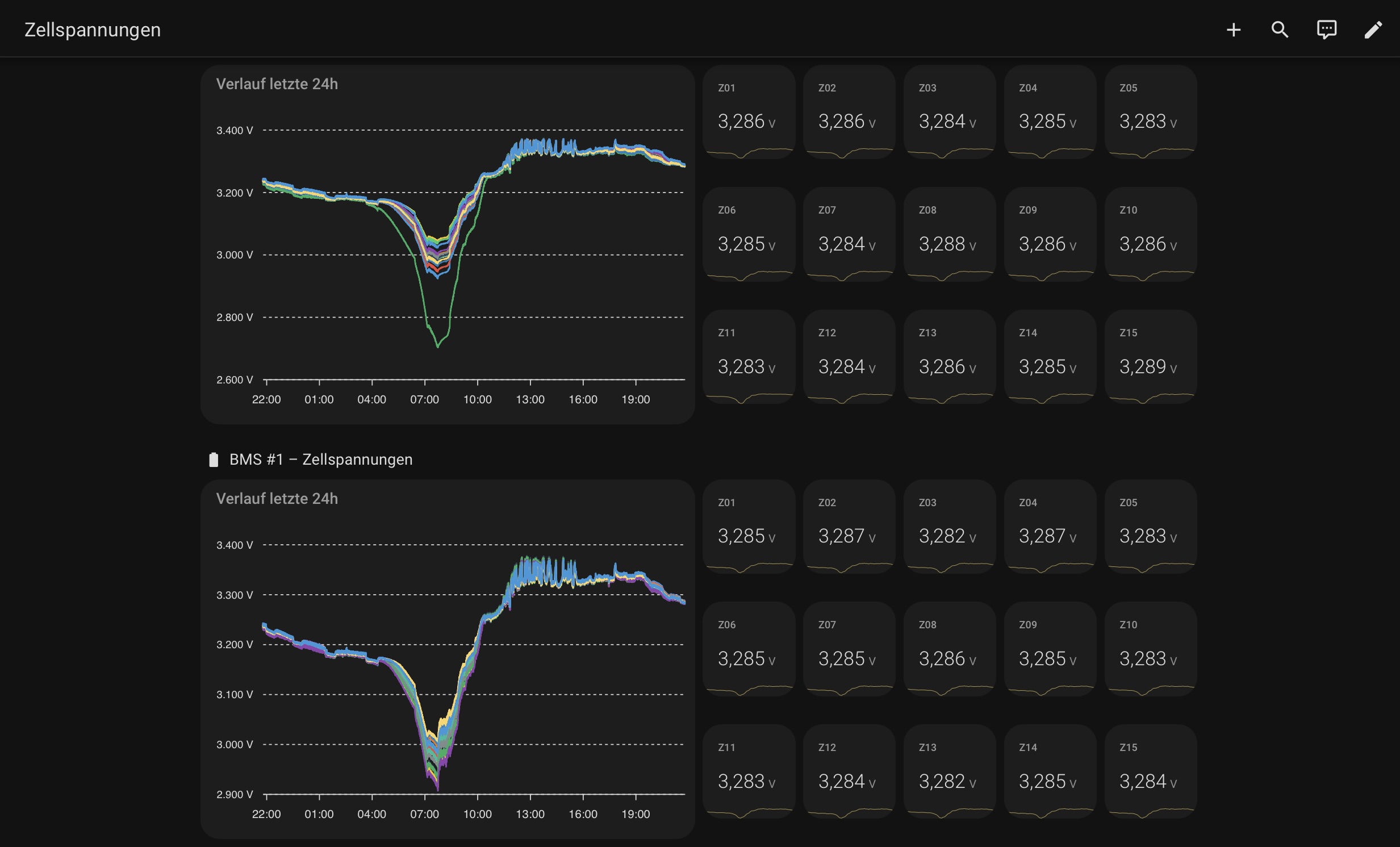
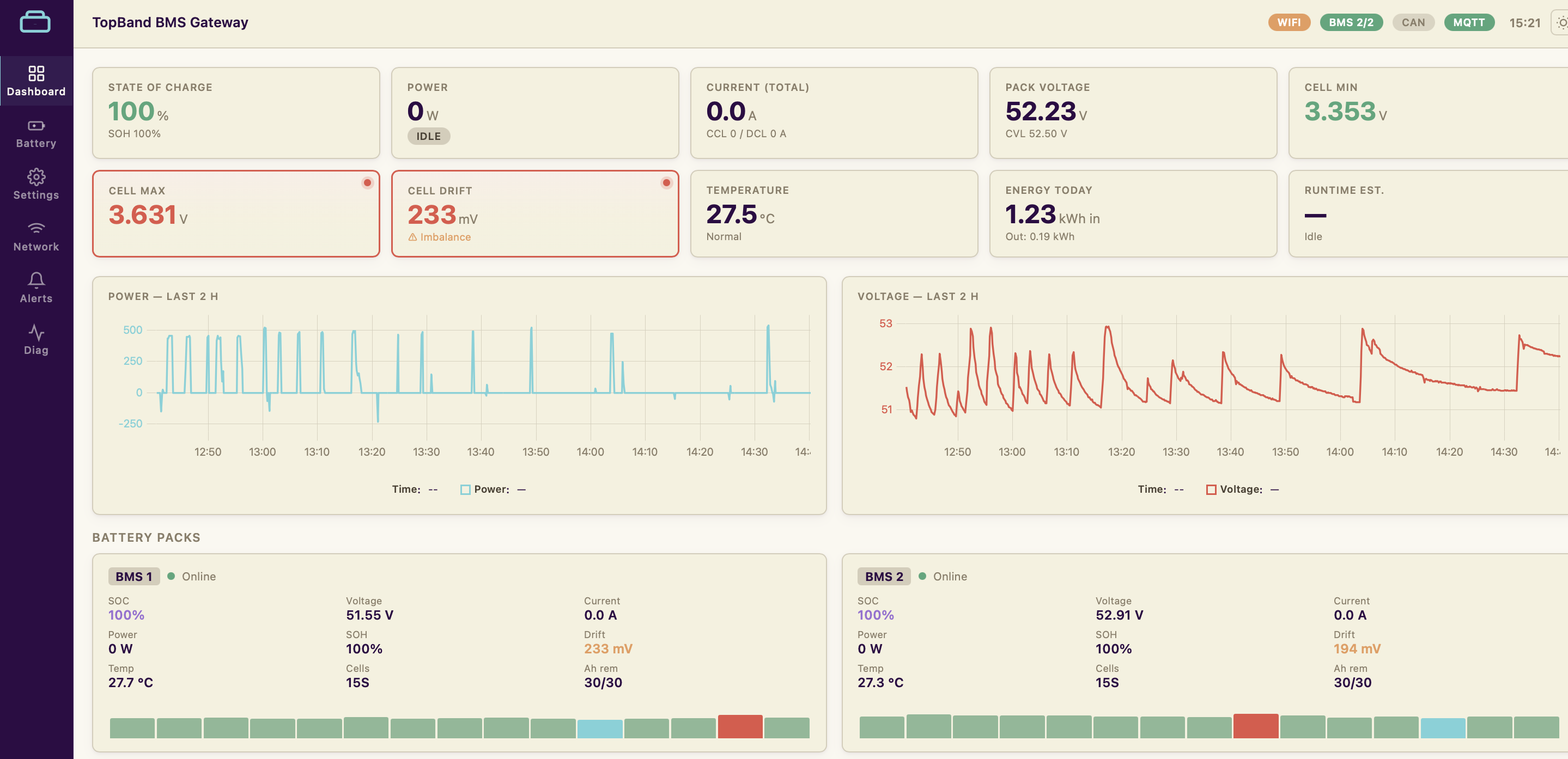
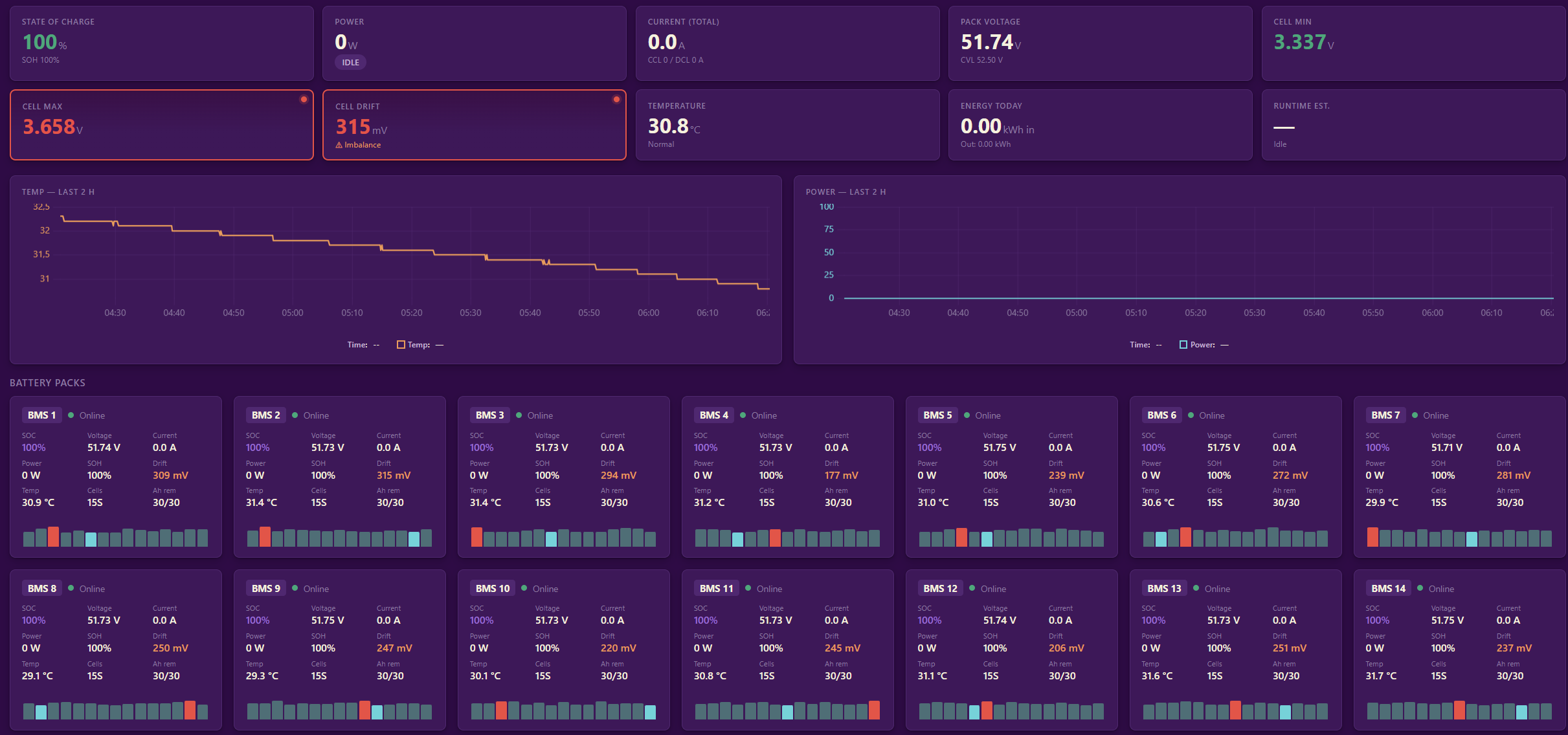
Home Assistant: Ich schicke jetzt alles auf Zellebene via MQTT rüber – das funktioniert absolut genial. Ich habe mir da ein schönes Dashboard gebastelt (siehe Screenshots im Anhang).
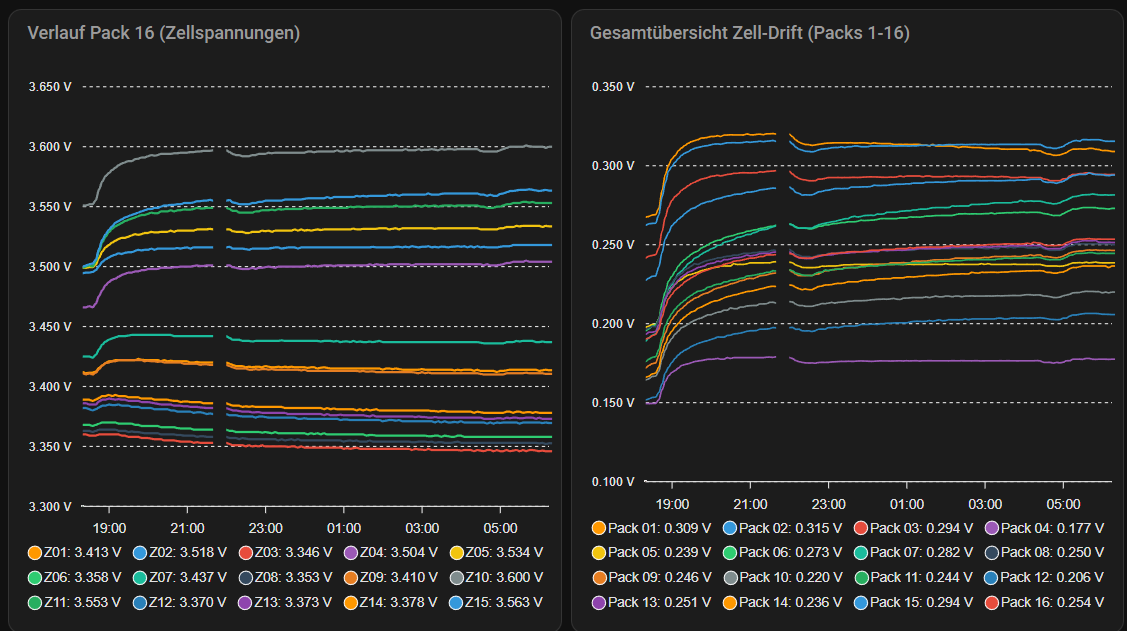
Zum eigentlichen Problem: Massiver Zelldrift (Top & Bottom)
Obwohl die 16 Packs an sich relativ gut laufen, habe ich massive Probleme mit dem Drift der Zellen – und zwar sowohl im oberen als auch im unteren Kapazitätsbereich.
-
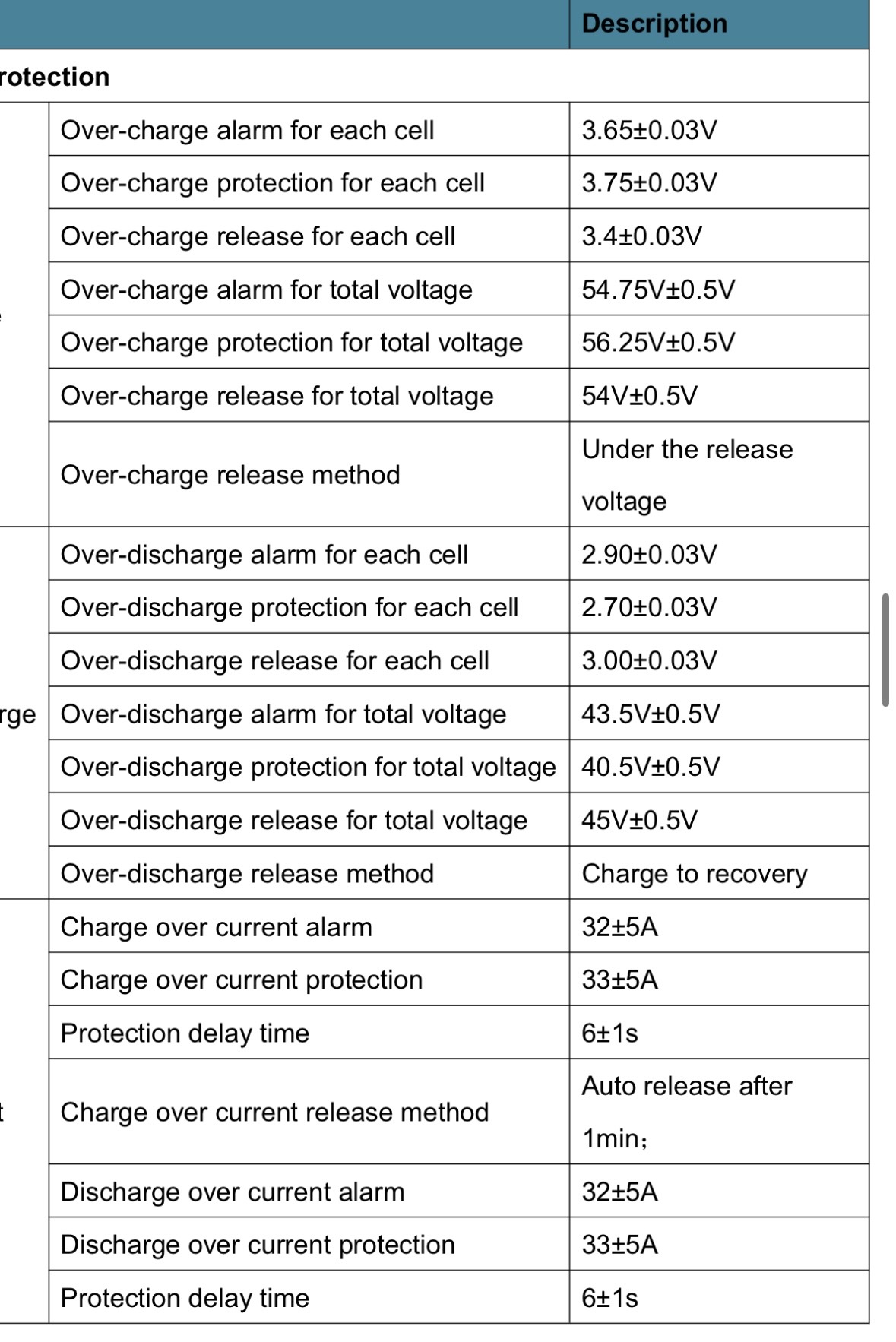
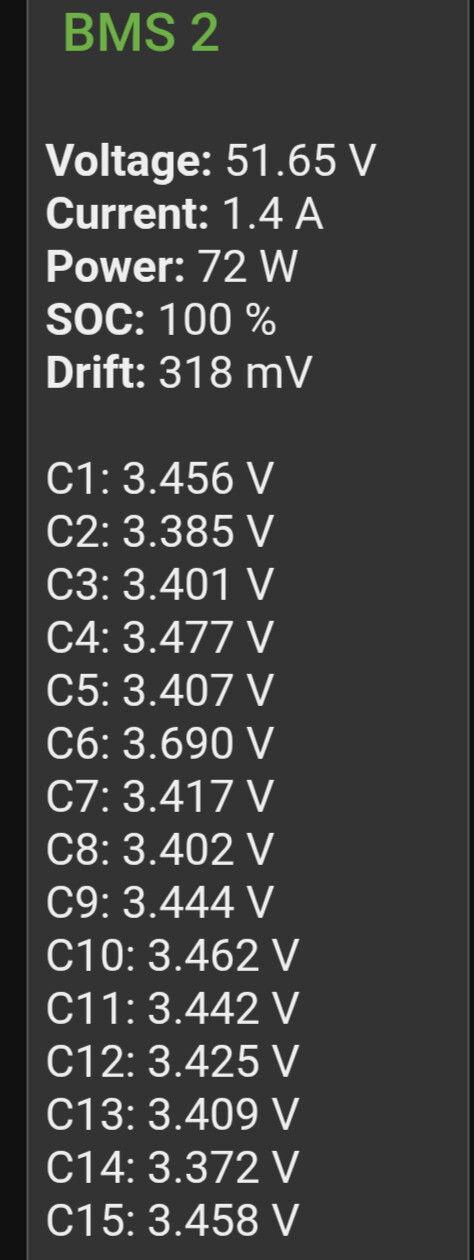
Normaler Betrieb: Ich habe im System ein Cap bei 51,5 Volt gesetzt. Höher laden meine 6 MPPT-Laderegler die Akkus leider nicht. Bei dieser Spannung geht zwar kein Akku in Störung, aber die Zellen driften teilweise bis zu 300 mV auseinander! Die höchste Zelle kratzt dann schon bei 3,65 V (OVP-Grenze), während die niedrigste noch bei müden 3,35 V herumdümpelt.
-
Aktueller Balancing-Versuch: Seit gestern Mittag habe ich die Solaranlage abgeklemmt und die Packs ins Top-Balancing gezwungen. Sie hängen jetzt an einem Labornetzteil, das sie dauerhaft auf 51,7 Volt hält.
-
Das Problem: Nach nun gut 24 Stunden sehe ich leider noch überhaupt keine Besserung oder Bewegung bei den Spannungen. Der interne Balancer scheint extrem langsam zu sein oder kommt einfach nicht hinterher. Ich werde das jetzt noch ein paar Tage so laufen lassen und weiter beobachten, bin aber skeptisch.
Im Anhang findet ihr einen Screenshot von einer exemplarischen Zelle sowie die Gesamtübersicht aus meinem Home Assistant.
Thema Garantie / Hersteller
Ich hatte die Akkus letztes Jahr direkt in Köln abgeholt. Wie ich zwischenzeitlich gesehen habe, hat die Firma ja sowohl den Namen als auch den Geschäftsführer geändert. Das Thema Garantie/Gewährleistung kann ich mir also vermutlich abschminken, weshalb ich das jetzt softwareseitig oder durch langes Balancing in den Griff bekommen muss.
Fragen an die Runde:
-
Habt ihr bei den EET-Packs ähnliche Erfahrungen mit so heftigem Drift (300 mV) gemacht?
-
Wie lange hat das Top-Balancing bei euch gedauert, bis der interne Balancer (der vermutlich nur mit ein paar Milliampere arbeitet) spürbar etwas ausgerichtet hat?
-
Gibt es Empfehlungen für optimierte Settings im Waterkant-Tool, um dem Drift im Alltag besser entgegenzuwirken?
Und noch ein nerviges Phänomen: Die Stromschwelle der BMS & SoC-Sprünge
Was mich im Alltag auch ziemlich stört, ist die ungenaue Strommessung der internen BMS bei geringen Strömen. Die BMS fangen über RS485 erst ab ca. 0,5 A überhaupt an zu melden, dass Strom fließt. Gerade in den Übergangszeiten (morgens, wenn die PV langsam anläuft, und abends in der Dämmerung) führt das zu etwa einer Stunde Überschneidung, in der die BMS denken, das System sei im Leerlauf – obwohl real Strom fließt.
Bei 16 Packs à 0,5 A und rund 50 V kommt da über die Zeit ordentlich Leistung zusammen, die von den Akkus einfach komplett ignoriert und nicht getrackt wird!
Zum Glück habe ich als primäre Referenz noch einen Victron 300A Shunt am Lynx Distributor/Cerbo GX hängen, der den echten Gesamteinkauf misst. Den ESP (mit dem Waterkant-Tool über LAN) habe ich quasi als "zweiten Akku" angebunden – der Victron-Shunt bleibt aber die Hauptreferenz für den SoC.
Im direkten Vergleich sieht man dann erst, wie massiv der berechnete SoC der BMS wegläuft:
-
Trotz der riesigen Gesamtkapazität liegen der reale SoC vom Shunt und die Meldungen der Akkus oft 10 bis 20 Prozentpunkte auseinander.
-
Manchmal melden die Akkus stolz 100% SoC, obwohl die Spannung gerade mal bei 49,8 V herumdümpelt.
-
Umgekehrt genauso nervig: Die Akkus zeigen noch 20% an, der Shunt sagt schon 5% – und kurz darauf springen die BMS plötzlich schlagartig von 20% auf 0% runter.
Das zeigt einfach, dass das interne SoC-Coulomb-Counting der EET-BMS ohne regelmäßigen Voll- oder Leerlauf komplett für die Tonne ist.
Freue mich auf euren Input!
2 „Gefällt mir“