ich habe seit einiger Zeit eine PV Anlage 5,2KW mit 10KW Batteriespeicher in Betrieb.
Die verwendeten Komponenten kommen von Victron:
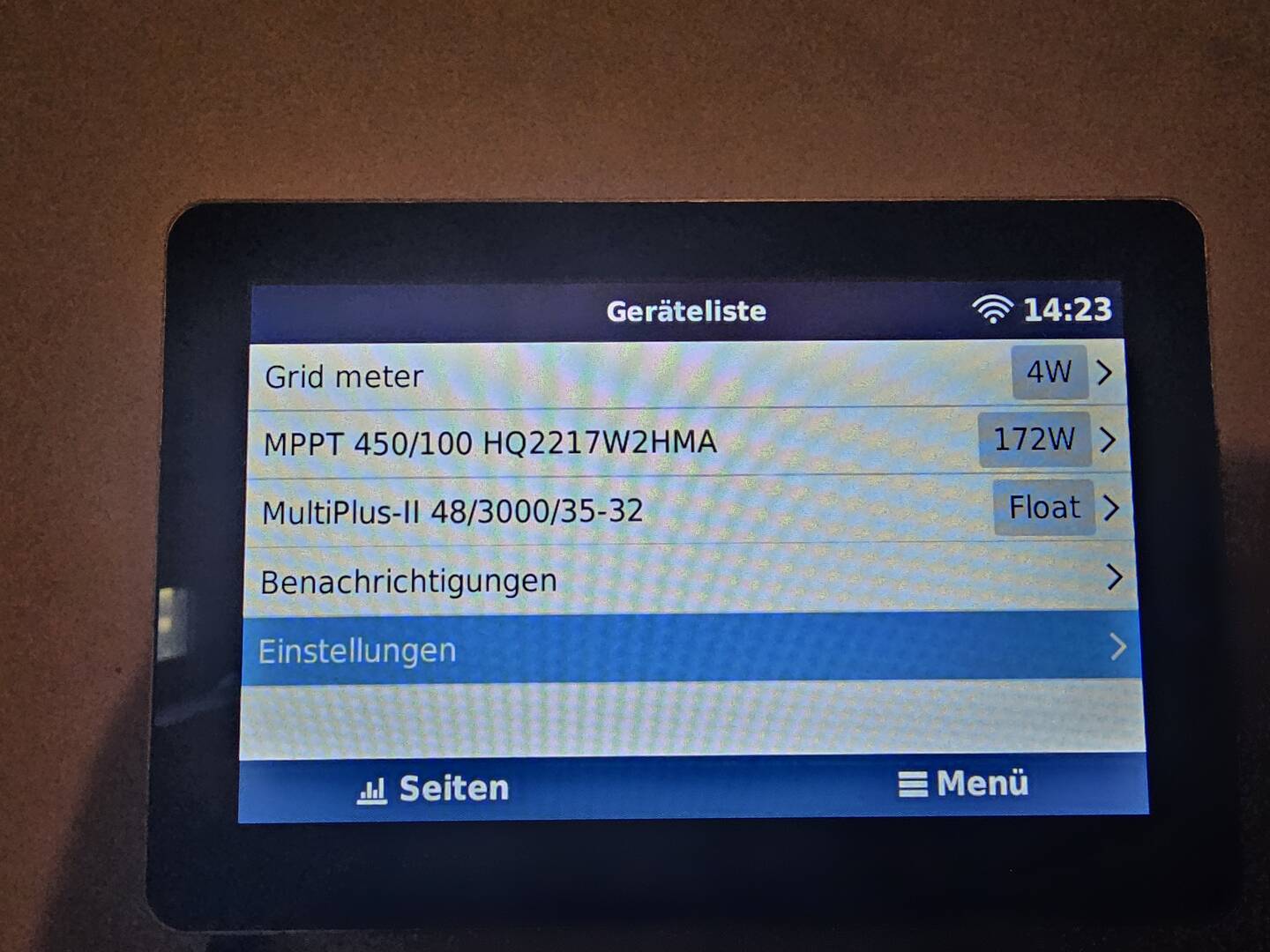
MultiPlus-II
MPPT RS 450 100
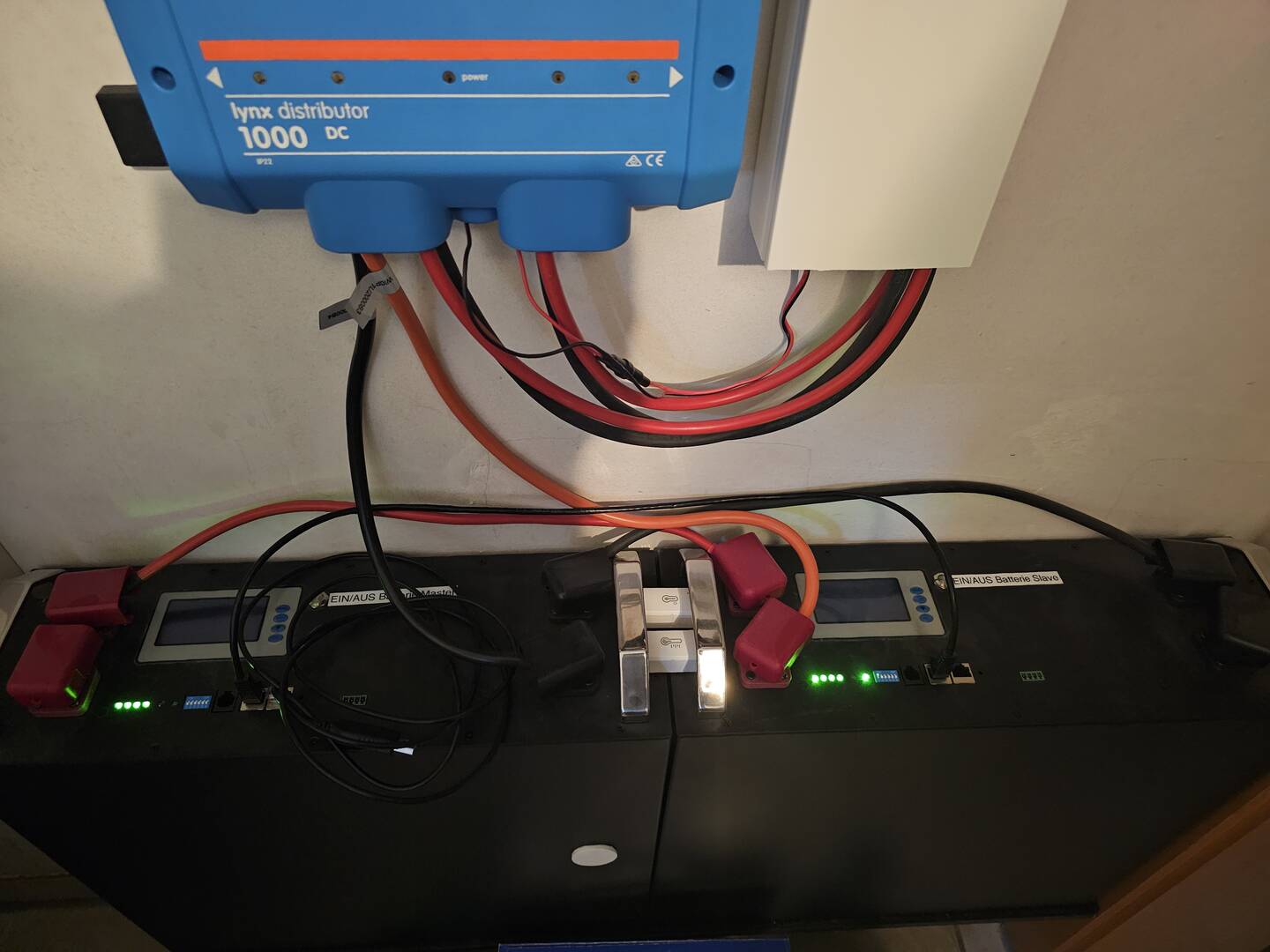
Die Batterie (LiFePO4 2 x 48V/100Ah) kommt von Alibaba. Der Händler hat angepriesen, diese sei mit Victron kompatibel. Mag auch sein, ich bekome sie aber nicht integriert.
Ich habe schon alles mir mögliche versucht aber ich schaffe es nicht und hoffe hier Hilfe zu bekommen.
Evtl. erkennt jemand diese Batterie wieder und kennt das Problem.
Ich wäre über eure Hilfe sehr dankbar!
Ich schau mal in meine Glaskugel und vermute mal, dass du nicht das korrekte Verbindungskabel hast.. VE.Can to CAN-bus BMS cables manual [Victron Energy]
Dafür muss die Battery/BMS natürlich kompatibel sein.. solange sie "Pylontech" via CAN spricht, sollte es ausreichend sein. Wenn Du dann 3 Posts hast, kannst Du auch Links / Bilder posten
Moin,
zu deinem Setup fehlen irgendwie weitere, nicht ganz unwichtige, Infos. Als da wären:
wie sind deine Victron-Komponenten kommunikationstechnisch miteinander verbunden (Cerbo, Raspi)?
wie soll der Akku an das System angebunden werden (RS485, CAN)?
Irgendwie kommt auch nicht klar rüber ob das System jetzt nicht mehr funzt oder ob es um weitere Komponenten erweitert wurde. Tipp: Schreibe unter Anderem mal einen Beitrag in https://www.akkudoktor.net/forum/stell-dich-vor/ damit bist der Möglichkeit, Links und Bilder zu posten gleich schon mal einen großen Schritt näher gekommen.
Für die Batterie gibt es am Cerbo einen getrennten BMS CAN. Die Batterie darf NICHT auf dem CAN Bus des RS450 angeschlossen werden. Die meisten "kompatiblen" China CAN Protokolle sind Punkt zu Punkt Verbindungen weshalb eine extra CAN Hardware benötigt wird.
Batterien sind eine sicherheitskritische Angelegenheit. Die Kommunikation zu einer übergeordneten Überwachung liefert eine redundante Instanz welche bei Fehlern im BMS frühzeitig abschalten kann. Batterien ohne Kommunikation sind wie Autofahren ohne Sicherheitsgurt. Solange kein Unfall passiert - kein Problem.
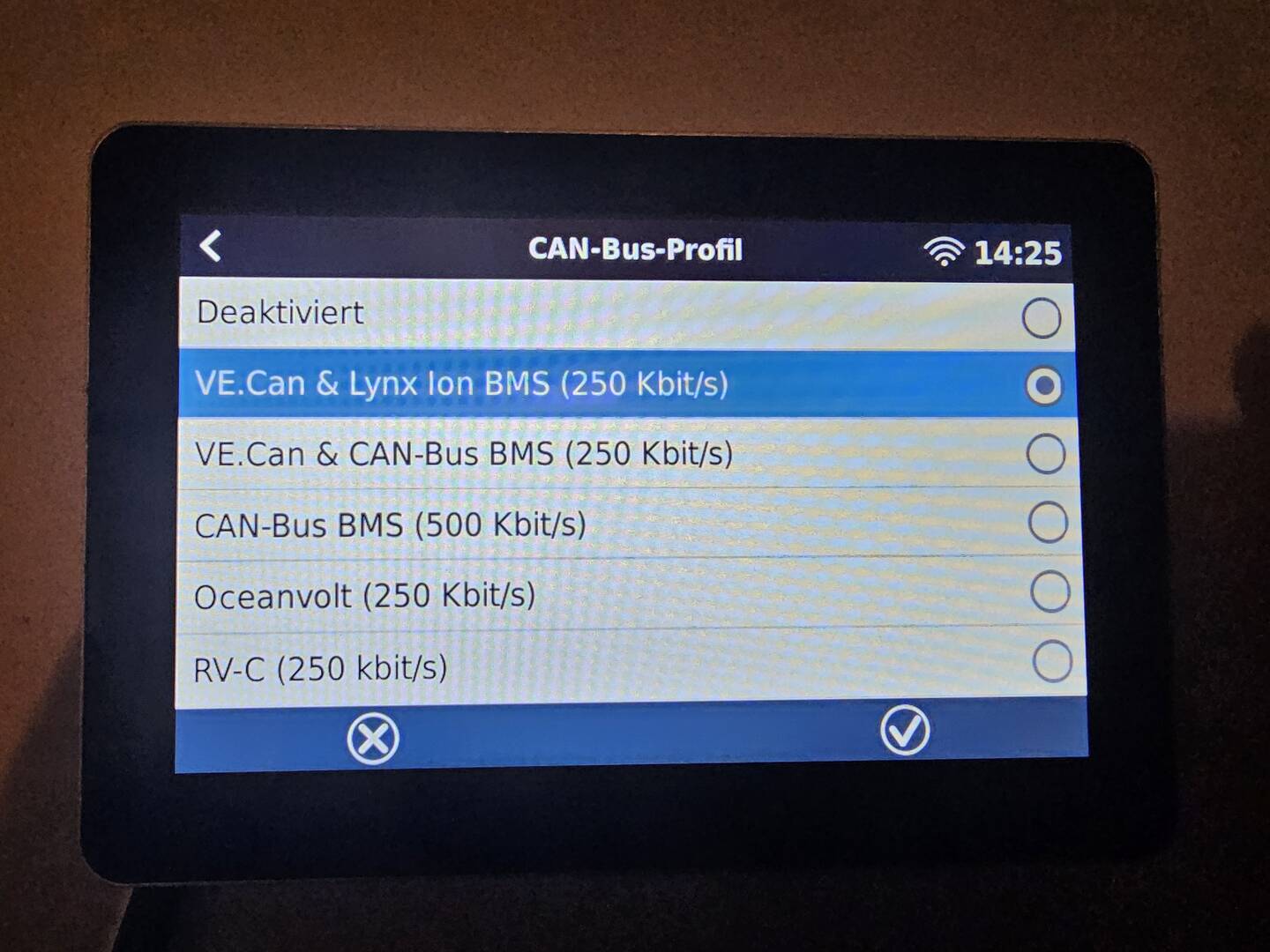
Dem würde ich widersprechen wollen, grundsätzlich ist CAN ein Bus und keine peer to peer Verbindung, aber möglicherweise werkelt hier ja was proprietäres da bin ich unsicher. Aber eines steht auf jeden Fall fest, die Datenrate unterscheidet sich zwischen Akku CAN und RS450. Warum auch immer da zwei verschiedene Geschwindigkeiten genutzt werden, der Akku läuft auf 500kbit/sec und der RS450 auf 250kbit/sec. Dies allein ist schon der Grund warum RS und Akku nicht auf dem gleichen CAN Bus laufen.
Wir setzen z.B. drei AMY Akkus mit Seplos V3 BMS ein. Hier passt z.B. die Pinbelegung der RJ45 Buchse am Akku nicht ohne Adapter auf eine CAN Schnittstelle. Da bei uns hinsichtlich VenusOS und Verkabelung alles DIY ist, kann ich nicht sagen ob ein org. Victron CAN Kabel von der Belegung her überhaupt passt, da müsste man mal in die Tiefe gehen.
Hierzu habe ich bereits einen Versuch gestartet. Wenn ich das Victron Kabel nehme und die Konfiguration für einen Pylontech Akku wähle, wird das China ESS System auch als Pylontech erkannt. Da Pylontech aber eine andere Konfiguration hat, kann die Einstellung nicht übernommen werden.
Für die Batterie ist das BMS die übergeordnete Überwachung : ausschliesslich für den Schutz des Akkus.
Man muss nicht das BMS überwachen, sondern das BMS überwacht die (Un)taten der Peripherie.
Batterien mit Kommunikation ist wie Autofahren mit halb durchgeschnittenen Sicherheitsgurt.
Es ist die Aufgabe der Peripherie, ihre Job richtig zu machen: Benutzen der Batterie unter ALLEN Bedingungen der Spezifikation.
Das BMS ist (wie oben gesagt) die Rettungsleine, wenn das schiefgeht.
Die Kommunikation wurde für Bequemlichkeit des Benutzers eingerichtet, und unterminiert das Schutzkonzept von 2 unabhängigen Kreisen.
Abgesehen, dass die heute verwendeten Kommunikationskonzepte keinerlei überstandene System- und Sicherheitsprüfung haben (Absicherung gegen Störung, Kommunikaionsasfall, Zusatndsprüfung, Notlauf.......) unterminiert die Kommunikation und das Betriebsverhalten auch jede sonst übliche Schutzmassnahme:
Stromsteuerung des Ladegerätes ohne gesicherte CV-Kennline, Sicherung gegen Änderung der BMS-Parameter durch die Kommunikation, usw.
Das sage ich. Natürlich muß das BMS alles richtig machen wie auch ein Autofahrer nie einen Unfall machen soll. Dazu gehört etwa die Begrenzung des Ladestroms wenn die Batterie voll ist, das Abschalten der Entladung wenn die Batterie leer ist, die Überwachung der Zelltemperaturen, das Balancieren des Zellspannungen usw.
Allerdings kann kein Autofahrer immer alle Verkehrsschilder beachten und weder Autos noch BMS funktionieren immer fehlerfrei. Fällt der uC des BMS etwa komplett aus, fehlt auch die Kommunikation zur übergordneten Steuerung und diese kann abschalten. Fällt im BMS etwa nur ein einzelner Analogeingang oder Zellbalancer aus, so ergibt dies unplausible Werte. Eine übergeordnete Steuerung am CAN Bus kann dies nicht korrigieren, aber sie kann als zweite Instanz die Unplausibilität erkennen und den Strom zur Batterie ganz abschalten. Wie ein Sicherheitsgurt hilft dies zwar nicht immer aber meist um die gröbsten Schäden zu vermeiden. Fehlt diese Kommunikation, so wird ein Ausfall im BMS erst mal gar nicht ohne Weiteres bemerkt sondern erst wenn es einen meist folgenschweren Folgefehler an der Batterie gibt.
@HF_SPSler Die üblichen Pylon kompatiblen Protokolle auf 500kbit verwenden leider die CAN-IDs welche ursprünglich zur Adressierung der Busteilnehmer gedacht waren zur Identifikation der Telegramminhalte was vermutlich ursprünglich von SMA verbockt wurde. Deshalb wird ein exklusiver BMS-CAN am Cerbo und darüber hinaus ein zweiter CAN Bus zum Verlinken von weiteren Slave Batterien benötigt. Das "richtige" CAN Protokoll von Victron nennt sich hingegen VE-CAN. und ist ein kompletter NMEA2000 Kommunikationsstack auf 250kbit mit plug und play Autokonfiguration welcher hier beschrieben ist.