Hallo,
ich habe bei mir folgendes System laufen:
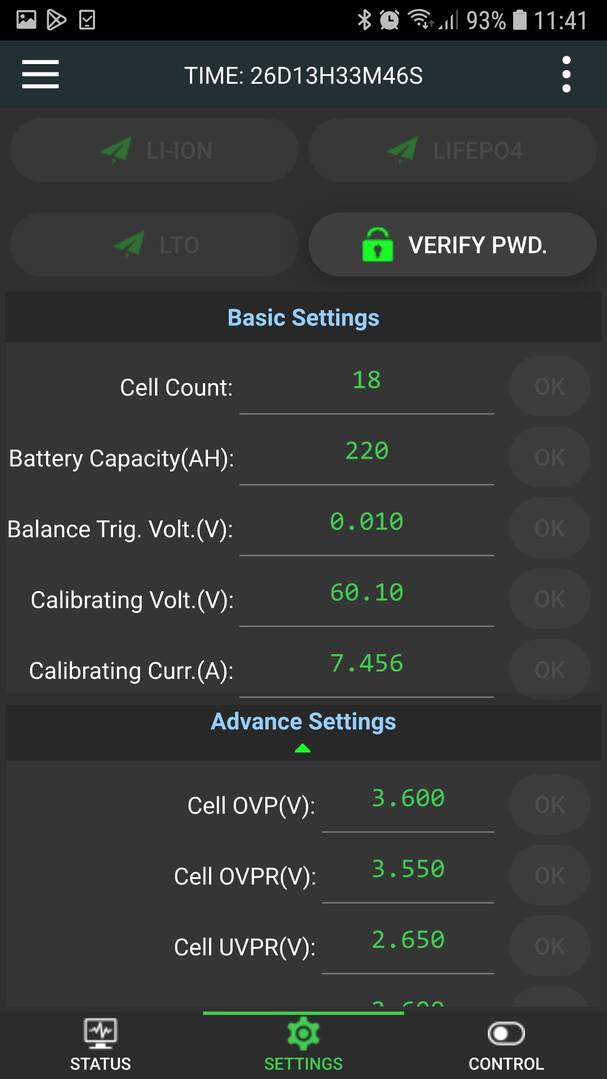
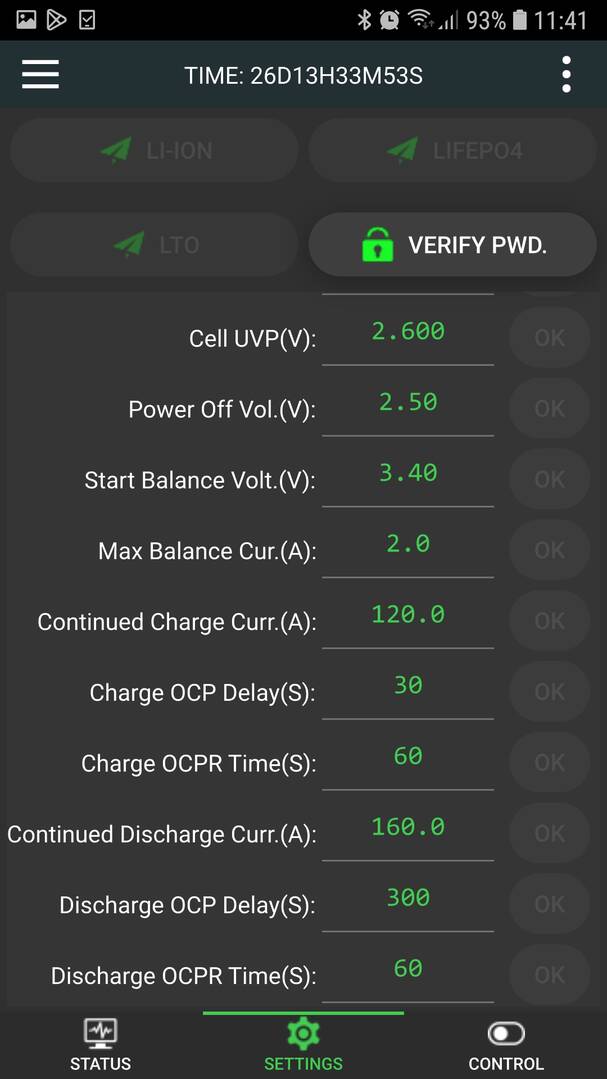
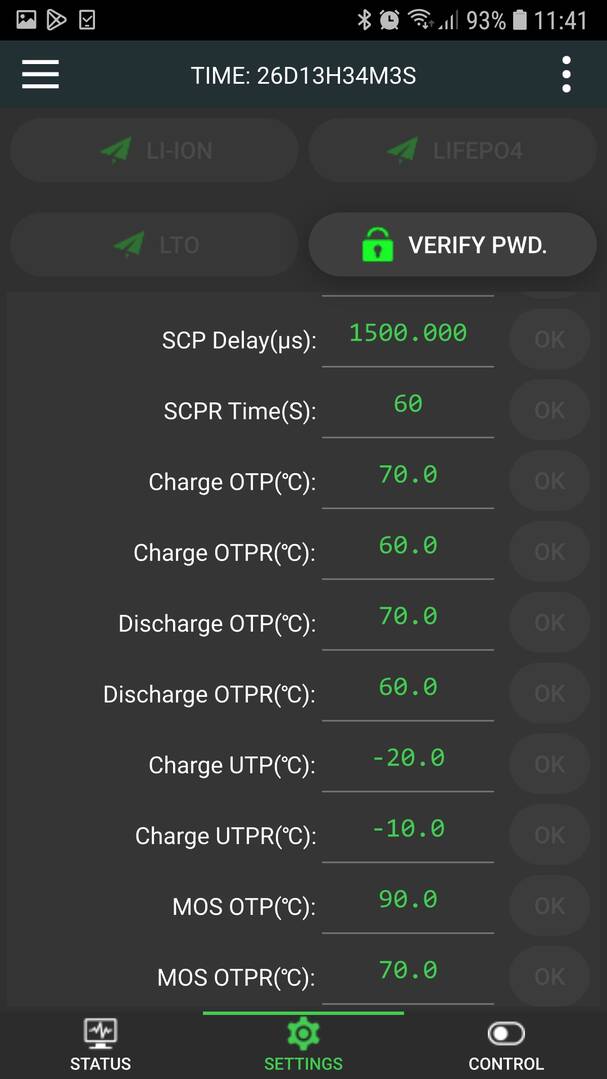
Akku: 18x 230Ah Eve-Zellen
BMS: JK-BMS
ESS: MP2 48/5000 mit Cerbo und dbus-serialbattery
... und habe folgendes Problem:
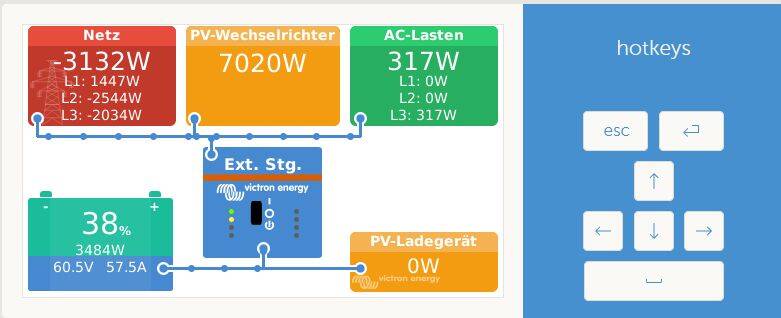
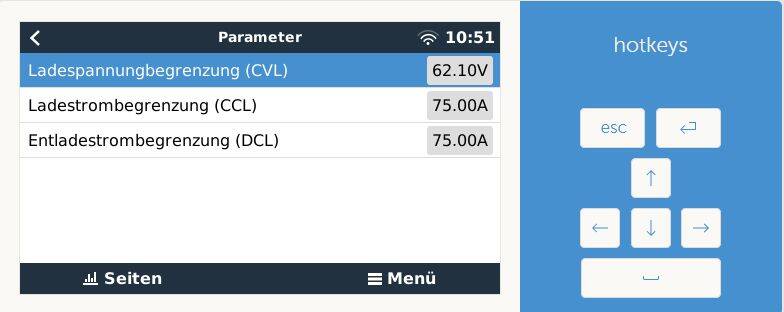
Der MP2 lädt mit maximal 55 bis 57A auch wenn mehr Solarüberschuss da ist und ich auch eigentlich den maximalen Ladestrom nicht begrenzt habe. Vom Prinzip her liegt die Begrenzung doch bei 70A und nicht einer bestimmten Leistung, oder?
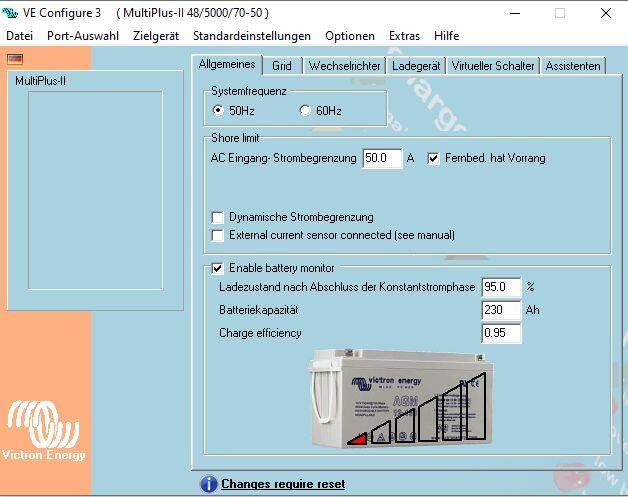
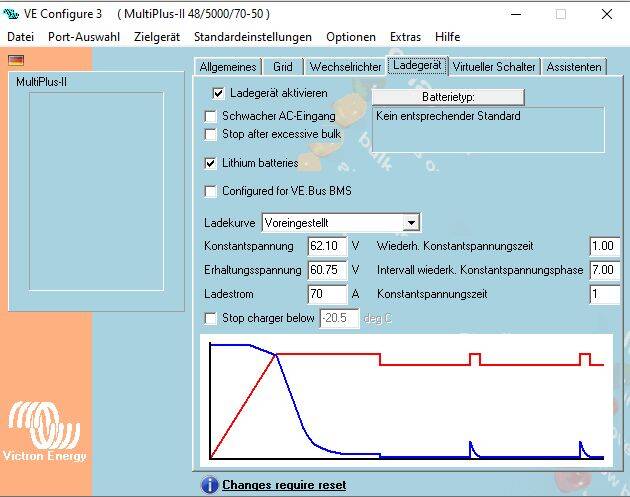
Unten ein paar Screenshot und die /data/etc/dbus-serialbattery/utils.py dazu.
Habe ich einen Punkt übersehen oder gibt es einen anderen Grund für die Limitierung?
Grüße,
Markus
# -*- coding: utf-8 -*- import logging import serial from time import sleep from struct import * import bisect # Logging logging.basicConfig() logger = logging.getLogger("SerialBattery") logger.setLevel(logging.INFO) # battery types # if not specified: baud = 9600 battery_types = [ {'bms' : "LltJbd"}, {'bms' : "Ant", "baud" : 19200}, {"bms" : "Daly", "address" : b"\x40"}, {"bms" : "Daly", "address" : b"\x80"}, {"bms" : "Jkbms", "baud" : 115200}, # {"bms" : "Sinowealth"}, {"bms" : "Lifepower"}, {"bms" : "Renogy", "address": b"\x30"}, {"bms" : "Renogy", "address": b"\xF7"}, {"bms" : "Ecs", "baud" : 19200}, # {"bms" : "MNB"}, ] # Constants - Need to dynamically get them in future DRIVER_VERSION = 0.14 DRIVER_SUBVERSION = '.3' zero_char = chr(48) degree_sign = u'\N{DEGREE SIGN}' # Choose the mode for voltage / current limitations (True / False) # False is a Step mode. This is the default with limitations on hard boundary steps # True "Linear" # New linear limitations by WaldemarFech for smoother values LINEAR_LIMITATION_ENABLE = False ######### Cell Voltage limitation ######### # Description: # Maximal charge / discharge current will be in-/decreased depending on min- and max-cell-voltages # Example: 18cells * 3.55V/cell = 63.9V max charge voltage. 18 * 2.7V = 48,6V min discharge voltage # ... but the (dis)charge current will be (in-/)decreased, if even ONE SINGLE BATTERY CELL reaches the limits # Charge current control management referring to cell-voltage enable (True/False). CCCM_CV_ENABLE = True # Discharge current control management referring to cell-voltage enable (True/False). DCCM_CV_ENABLE = True # Set Steps to reduce battery current. The current will be changed linear between those steps CELL_VOLTAGES_WHILE_CHARGING = [3.55, 3.50, 3.45, 3.30] MAX_CHARGE_CURRENT_CV = [ 0, 2, 30, 75] CELL_VOLTAGES_WHILE_DISCHARGING = [3.00, 3.05, 3.10, 3.15] MAX_DISCHARGE_CURRENT_CV = [ 0, 2, 20, 80] ######### Temperature limitation ######### # Description: # Maximal charge / discharge current will be in-/decreased depending on temperature # Example: The temperature limit will be monitored to control the currents. If there are two temperature senors, # then the worst case will be calculated and the more secure lower current will be set. # Charge current control management referring to temperature enable (True/False). CCCM_T_ENABLE = True # Charge current control management referring to temperature enable (True/False). DCCM_T_ENABLE = True # Set Steps to reduce battery current. The current will be changed linear between those steps TEMPERATURE_LIMITS_WHILE_CHARGING = [55, 40, 35, 5, 2, 0] MAX_CHARGE_CURRENT_T = [ 0, 28, 75, 75, 28, 0] TEMPERATURE_LIMITS_WHILE_DISCHARGING = [55, 40, 35, 5, 0, -20] MAX_DISCHARGE_CURRENT_T = [ 0, 28, 75, 75, 28, 0] # if the cell voltage reaches 3.55V, then reduce current battery-voltage by 0.01V # if the cell voltage goes over 3.6V, then the maximum penalty will not be exceeded # there will be a sum of all penalties for each cell, which exceeds the limits PENALTY_AT_CELL_VOLTAGE = [3.45, 3.55, 3.6] PENALTY_BATTERY_VOLTAGE = [0.01, 1.0, 2.0] # this voltage will be subtracted ######### SOC limitation ######### # Description: # Maximal charge / discharge current will be increased / decreased depending on State of Charge, see CC_SOC_LIMIT1 etc. # The State of Charge (SoC) charge / discharge current will be in-/decreased depending on SOC. # Example: 16cells * 3.45V/cell = 55,2V max charge voltage. 16*2.9V = 46,4V min discharge voltage # Cell min/max voltages - used with the cell count to get the min/max battery voltage MIN_CELL_VOLTAGE = 2.9 MAX_CELL_VOLTAGE = 3.45 FLOAT_CELL_VOLTAGE = 3.35 MAX_VOLTAGE_TIME_SEC = 15*60 SOC_LEVEL_TO_RESET_VOLTAGE_LIMIT = 90 # battery Current limits MAX_BATTERY_CHARGE_CURRENT = 75.0 MAX_BATTERY_DISCHARGE_CURRENT = 75.0 # Charge current control management enable (True/False). CCCM_SOC_ENABLE = False # Discharge current control management enable (True/False). DCCM_SOC_ENABLE = False #charge current soc limits CC_SOC_LIMIT1 = 98 CC_SOC_LIMIT2 = 95 CC_SOC_LIMIT3 = 91 #charge current limits CC_CURRENT_LIMIT1 = 5 CC_CURRENT_LIMIT2 = MAX_BATTERY_CHARGE_CURRENT/4 CC_CURRENT_LIMIT3 = MAX_BATTERY_CHARGE_CURRENT/2 #discharge current soc limits DC_SOC_LIMIT1 = 10 DC_SOC_LIMIT2 = 20 DC_SOC_LIMIT3 = 30 #discharge current limits DC_CURRENT_LIMIT1 = 5 DC_CURRENT_LIMIT2 = MAX_BATTERY_DISCHARGE_CURRENT/4 DC_CURRENT_LIMIT3 = MAX_BATTERY_DISCHARGE_CURRENT/2 # Charge voltage control management enable (True/False). CVCM_ENABLE = False # Simulate Midpoint graph (True/False). MIDPOINT_ENABLE = False #soc low levels SOC_LOW_WARNING = 20 SOC_LOW_ALARM = 10 # Daly settings # Battery capacity (amps) if the BMS does not support reading it BATTERY_CAPACITY = 50 # Invert Battery Current. Default non-inverted. Set to -1 to invert INVERT_CURRENT_MEASUREMENT = 1 # TIME TO SOC settings [Valid values 0-100, but I don't recommend more that 20 intervals] # Set of SoC percentages to report on dbus. The more you specify the more it will impact system performance. # TIME_TO_SOC_POINTS = [100, 95, 90, 85, 80, 75, 70, 65, 60, 55, 50, 45, 40, 35, 30, 25, 20, 15, 10, 5, 0] # Every 5% SoC # TIME_TO_SOC_POINTS = [100, 95, 90, 85, 75, 50, 25, 20, 10, 0] TIME_TO_SOC_POINTS = [] # No data set to disable # Specify TimeToSoc value type: [Valid values 1,2,3] # TIME_TO_SOC_VALUE_TYPE = 1 # Seconds # TIME_TO_SOC_VALUE_TYPE = 2 # Time string HH:MN:SC TIME_TO_SOC_VALUE_TYPE = 3 # Both Seconds and time str "<seconds> [days, HR:MN:SC]" # Specify how many loop cycles between each TimeToSoc updates TIME_TO_SOC_LOOP_CYCLES = 5 # Include TimeToSoC points when moving away from the SoC point. [Valid values True,False] # These will be as negative time. Disabling this improves performance slightly. TIME_TO_SOC_INC_FROM = False # Select the format of cell data presented on dbus. [Valid values 0,1,2,3] # 0 Do not publish all the cells (only the min/max cell data as used by the default GX) # 1 Format: /Voltages/Cell# (also available for display on Remote Console) # 2 Format: /Cell/#/Volts # 3 Both formats 1 and 2 BATTERY_CELL_DATA_FORMAT = 1 # Settings for ESC GreenMeter and Lipro devices GREENMETER_ADDRESS = 1 LIPRO_START_ADDRESS = 2 LIPRO_END_ADDRESS = 4 LIPRO_CELL_COUNT = 15 def constrain(val, min_val, max_val): if min_val > max_val: min_val, max_val = max_val, min_val return min(max_val, max(min_val, val)) def mapRange(inValue, inMin, inMax, outMin, outMax): return outMin + (((inValue - inMin) / (inMax - inMin)) * (outMax - outMin)) def mapRangeConstrain(inValue, inMin, inMax, outMin, outMax): return constrain(mapRange(inValue, inMin, inMax, outMin, outMax), outMin, outMax) def calcLinearRelationship(inValue, inArray, outArray): if inArray[0] > inArray[-1]: # change compare-direction in array return calcLinearRelationship(inValue, inArray[::-1], outArray[::-1]) else: # Handle out of bounds if inValue <= inArray[0]: return outArray[0] if inValue >= inArray[-1]: return outArray[-1] # else calculate linear current between the setpoints idx = bisect.bisect(inArray, inValue) upperIN = inArray[idx - 1] # begin with idx 0 as max value upperOUT = outArray[idx - 1] lowerIN = inArray[idx] lowerOUT = outArray[idx] return mapRangeConstrain(inValue, lowerIN, upperIN, lowerOUT, upperOUT) def calcStepRelationship(inValue, inArray, outArray, returnLower): if inArray[0] > inArray[-1]: # change compare-direction in array return calcStepRelationship(inValue, inArray[::-1], outArray[::-1], returnLower) # Handle out of bounds if inValue <= inArray[0]: return outArray[0] if inValue >= inArray[-1]: return outArray[-1] # else get index between the setpoints idx = bisect.bisect(inArray, inValue) return outArray[idx] if returnLower else outArray[idx-1] def is_bit_set(tmp): return False if tmp == zero_char else True def kelvin_to_celsius(kelvin_temp): return kelvin_temp - 273.1 def format_value(value, prefix, suffix): return None if value is None else ('' if prefix is None else prefix) + \ str(value) + \ ('' if suffix is None else suffix) def read_serial_data(command, port, baud, length_pos, length_check, length_fixed=None, length_size=None): try: with serial.Serial(port, baudrate=baud, timeout=0.1) as ser: return read_serialport_data(ser, command, length_pos, length_check, length_fixed, length_size) except serial.SerialException as e: logger.error(e) return False # Open the serial port # Return variable for the openned port def open_serial_port(port, baud): ser = None tries = 3 while tries > 0: try: ser = serial.Serial(port, baudrate=baud, timeout=0.1) tries = 0 except serial.SerialException as e: logger.error(e) tries -= 1 return ser # Read data from previously openned serial port def read_serialport_data(ser, command, length_pos, length_check, length_fixed=None, length_size=None): try: ser.flushOutput() ser.flushInput() ser.write(command) length_byte_size = 1 if length_size is not None: if length_size.upper() == 'H': length_byte_size = 2 elif length_size.upper() == 'I' or length_size.upper() == 'L': length_byte_size = 4 count = 0 toread = ser.inWaiting() while toread < (length_pos+length_byte_size): sleep(0.005) toread = ser.inWaiting() count += 1 if count > 50: logger.error(">>> ERROR: No reply - returning") return False #logger.info('serial data toread ' + str(toread)) res = ser.read(toread) if length_fixed is not None: length = length_fixed else: if len(res) < (length_pos+length_byte_size): logger.error(">>> ERROR: No reply - returning [len:" + str(len(res)) + "]") return False length_size = length_size if length_size is not None else 'B' length = unpack_from('>'+length_size, res,length_pos)[0] #logger.info('serial data length ' + str(length)) count = 0 data = bytearray(res) while len(data) <= length + length_check: res = ser.read(length + length_check) data.extend(res) #logger.info('serial data length ' + str(len(data))) sleep(0.005) count += 1 if count > 150: logger.error(">>> ERROR: No reply - returning [len:" + str(len(data)) + "/" + str(length + length_check) + "]") return False return data except serial.SerialException as e: logger.error(e) return False