Ohne jetzt alle Posts im Detail gelesen zu haben: Eine ganzheitliche Systembetrachtung mit halbwegs erfolgreich prognosebasiertem Akkubetrieb geht nicht ohne das BMS in einen übergeordneten Regelkreis einzubinden. Tatsächlich ist das aber nicht ein Regelkreis, sondern mehrere Verschachtelte Kreise was auch als Kaskadenregler bekannt ist. Eine wichtige Voraussetzung für eine halbwegs erfolgreiche Regelung ist eben, daß der SOC über das BMS auch korrekt ermittelt werden kann. Bei mir läuft das jetzt im zweiten Jahr automatisch. Im Sommer sorgt der Regler dafür, daß der Akku am Morgen leer ist und tagsüber soviel aufnehmen kann daß nix abgeregelt werden muß. Im Winter wird der SOC bei 50% angenähert. Der Regler ist auch nicht an einem Tag entstanden und das BMS ist nur ein ziemlich kleiner aber wichtiges Teil davon. In meinem Fall jetzt auch unter unseren blauen Freunden welche von sicher aus schon einiges selbst können. Aber im Prinzip kann man das mit jedem anderen System auch so aufbauen.
Meiner Einschätzung nach liegt dem eine “falsche”/andere Vorstellung zu Grunde, wie z.B. die Messwerte vom BMS durch den WR genutzt werden. In den Setups, die ich selber kenne, regelt eher nicht der WR direkt auf den SOC, insbesondere nicht einfach “Voll durchladen “ solange der gemeldete SOC nicht bei 100 % liegt.
Typischer dürfte sein, dass ein BMS oder ein EMS so konfiguriert ist, dass es z.B. im Sommer normalerweise nur bis 95% SOC läd. Das wird dann schlicht dadurch erreicht, dass bei ( oder kurz vor ) Erreichen des Zielwertes der dem WR erlaubte Ladestrom auf 0 reduziert wird. Die im WR maximal erlaubten Limits für Ladeströme und Ladespannung bleiben davon völlig unberührt. Nach meiner Erinnerung kann man das in der Art bei Victron ( BMS hängt an Venus, Venus regelt den WR ) umsetzen. Bei meinem BMS habe ich hier ein Laden auf Ziel-SOC direkt an einem Deye-WR in Betrieb.
Der Deye WR führt dann intern auch zwei unterschiedliche Datensätze zu der Batterie:
Einmal die eigene Messung ( Temperatursensor ist nicht angeschlossen )
BAT1: SOC: 79.0 %, 52.94 V, -17.87 A, -944 W, 119.5 °C
und die Werte vom BMS
BMS: SOC: 79.0 %, 52.95 V, -18.00 A, 19.5 °C
V_CHG_end: 53.70, I_CHG/DSG_max: 57/ 59 A
Ohne Kommunikation mit dem BMS erzeugt der Deye seinen eignenen (ungenauen ) Schätzwert für SOC. Sobald die Kommunikation mit dem BMS aktiviert ist, kopiert er ganz offensichtlich auch den BMS SOC-Wert in das Feld der eigenen Schätzung. Strom- und Spannungsmessung bleiben aber unabhängig.
Außerdem leitet der Deye aus den erlaubten CHG/DSG Strömen vom BMS eigene Schwellen BAT_Current_DSG/CHG_Offgrid_MAX ab, die nach meinem Eindruck die Werte vom BMS + 20 A sind.
Die am Display eingestellten maximal erlaubten CHG/DSG Ströme bleiben zusätzlich weiter aktiv.
Weil die “situativen” Einschränkungen vom BMS typischerweise immer strikter sind als die des WR.
Es geht eben nicht darum, dass das BMS “mehr als sonst”, sondern “weniger als sonst“ erlaubt.
Wenn man sein BMS nicht kennt, finde ich dieses konservative Vorgehen sinnvoll.
Man sollte aber damit vorsichtig sein, das zu verallgemeinern. Die FETs, die ich in meinem BMS verbaue, würden in anderen Anwendungen tendenziell eher höhere Ströme als bei einer “normalen” Abschaltung durch das BMS mit 100 kHz schalten, also ~ 3 Billionen mal im Jahr. Ein vernünftig ausgelegeter MOSFET-Schalter bei einem BMS ist durch Schalten nicht kaputt zu kriegen.
Da stimme voll zu. Das Verhalten ist bei vielen BMS und insbesondere WR kaum dokumentiert, so dass es ein Rätselraten ist, welche Einstellung wann, genau wie wirksam werden.
Das ist eine einschränkung.
Als Nutzer kaufe ich eine Batterie (incl. BMS) und einen WR und muss hoffen, daß das gut funktioniert. Läuft das schlecht oder gar nicht und zum Glück bemerkst es, kannst nicht allzu viel machen. Wie soll ich als Anwender es schaffen, eine WR-kompatible Ersatzfunktion aufzubauen?
Erstmal bin ich sehr froh über ber die Diskussonskultur hier und die darin laufende Diskussion. Dabei bin ich mit den technischen Darstellungen total einverstanden, mit den daraus gezogenen Schlussfolgerungen größtenteils nicht. Was überhaupt kein Problem ist, jedenfalls nicht für mich. Mir genügt es erstmal, wenn meine Einwände wenigstens so ernst genommen werden, dass technische Beschreibungen dagegen gesetzt werden.
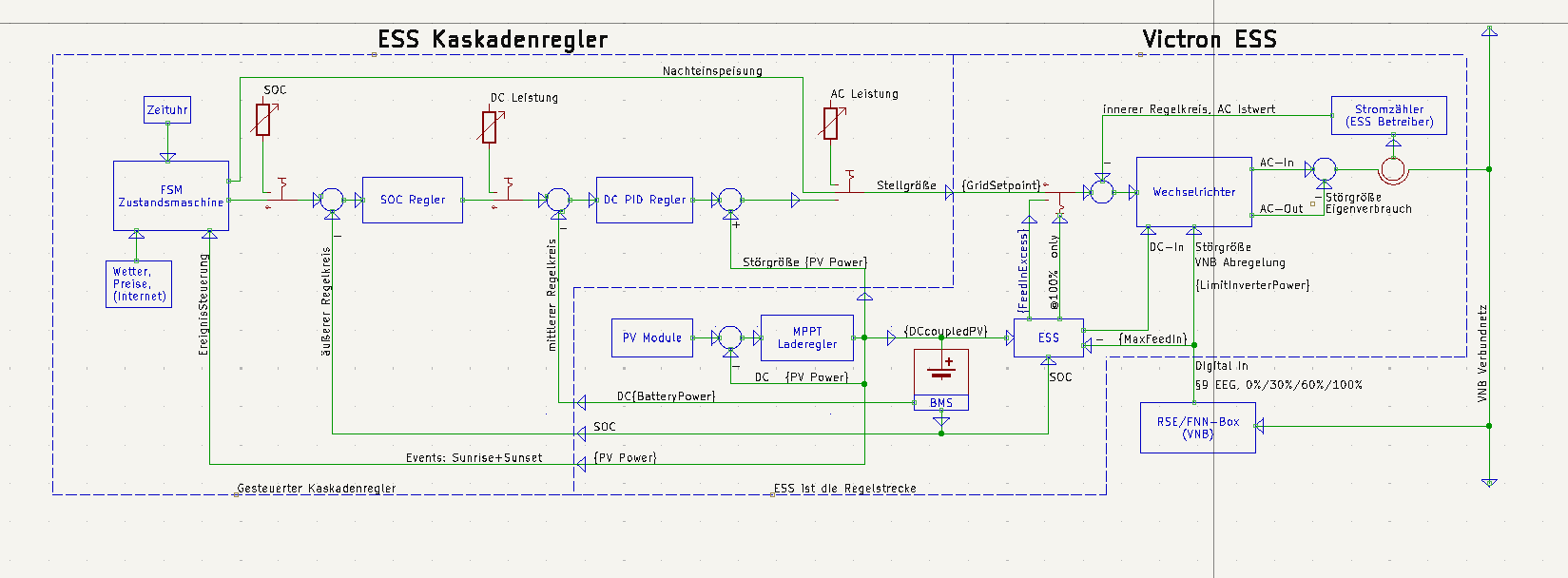
Im Beitrag vvon @janvi sehe ich zum allerersten mal eine regelungstechnisch durchkonstruierte Funktionalität… ich bin auf tiefste beeindruckt.
Auf der anderen Seite:
Das ist die Stelle, an der ich das Grundproblem sehe: imho eher ein Definitionsproblem als komplett unterschiedliche Meinung.
Lautet der Satz nämlich: …. ohne die dem BMS bekannten Daten ( Zellspannungen usw.) für den übergeordneten Regelkreis getrennt zu ermitteln und… einzubinden.
Bei aller technischer Beschreibung sehe ich nämlich nicht die Trennung Der BMS Funktionalität (schutz des Akkus) und der gesamten Regelungsfunktionalität ( die tatsächlich die gleichen Daten braucht wie das BMS ermittelt).
Was ich nämlich in den Beschreibungen (ausser bei @ViennaTom , Janvi und Nimbus4 , sorry wenn ich jemanden übersehen habe) vermisse ist Betrachtungen der System Funktionalität bei defekten oder gestörten Details der Funktionalität: Die “FMEA”.
Und die Konsequenz einer FMEA, dass die Einhaltung dessen, was das BMS schützen soll, bei einem beliebigen Fehler im gesamten System noch erhalten bleibt.
Aber wie schon angedeutet: es genügt mir momentan, dass man/ihr euch überhaupt mit dem Problem beschäftigt. Dafür danke ich allen!!
Das ist die eine Stelle, der ich schärfstens widersprechen muss. Das BMS muss mehr zulassen als der Betriebsregelfall verwendet. Ansonsten verletzt man formal die Regel “ein BMS ist kein Betriebsschalter”.
Das gesamtsystem muss innerhalb der Betriebsgrenzen bleiben. Dazu muss Stromquelle / -senke immer wissen, was die Zellen vertragen.
Die grenzwerte der Zellen sind nach Datenblatt bekannt und die stehen im BMS.
Die geplanten Betriebswerte müssen sanfter sein als die Grenzwerte und stehen wo auch immer im Gesamtsystem, schon alleine deswegen holt man sie nicht aus dem BMS.
Die Betriebsgrenzen der Zellen verändern sich nach Ladestand, Alterung, Erwärmung usw, da hilft kein Datenblatt. Sowas bleibt ja nich ewig im Neuzustand.
Mal praktisch: Für meinen bekannten ist geplant 20kW WR und 2 x 30kWh Batterie. Das wird wohl einige Zeit funktionieren, ohne daß der WR mim BMS redet. Das ist ja die aufgestellte Hypothese, daß das sicherer sei.
Läuft aber irgendwas in der Batterie ausm Ruder, woher soll dann der WR wissen, was zu tun ist?
Wir scheinen hier leider immer noch maximal aneinander vorbei zu diskutieren:
Wenn ein LFP Akku z.B. auf 5 °C abgekühlt ist und das BMS auf Grund eines mathematischen Models des Zelltyps zu dem Schluss kommt, dass nominal nur noch 10 A Ladestrom fließen dürfen um Lithium-Plating zu verhindern, dann muss als erstes dieser “nominal” Wert auf “worst case” derated werden ( also z.B auf 9 A ). Das wäre dann die interne Abschaltschwelle. Wenn nun das BMS dem WR einen erlaubten Ladestrom mitteilt, muss (hoffentlich völlig selbstverständlich) ein weiteres Derating vorgenommen werden ( also dem WR ein kleinerer Wert von z.B. 8 A mitgeteilt werden ) , weil man ansonsten zwangsläufig in eine Abschaltung hineinläuft.
Für ein solches Szenario ist im übrigen kaum eine praktikable Lösung ohne Kommunikation zwischen WR und BMS möglich. Bei 25°C kann der Akku möglicherweise 100 A Ladestrom verkraften und praktisch kaum ein Kunde dürfte akzeptieren den Akku wegen der Einschränkung bei 5 °C ganz grundsätzlich auf 8 A zu begrenzen.
Wenn der WR z.B. eine Begrenzung auf 50 A eingestellt hätte ( was für 25 °C völlig in Ordnung wäre ) und es keine Kommunikation mit dem BMS gäbe, die bei 5 °C die Reduzierung veranlassen würde, würde das eben zu dem führen, was du nicht möchtest, nämlich ständiges Trennen durch das BMS.
Die Kommunikation führt hier zu einem sicheren und keinesfalls einem unsicheren Betrieb.
Letzendlich ist das auch nicht nur meine persönliche Meinung sondern ist z.B. beim DC-Laden von EVs Stand der Technik.
Gerade im EV Bereich mit zukünftig vermutlich üblichem Schnellladen in < 10 min wird die Führung des Ladevorgangs durch das BMS im Auto essentiell sein.
Dem füge ich nichts mehr hinzu.
Nun irgendwie scheinst du auszuweichen. Wie stellst du dir denn ein “ideales” System vor.
@nimbus4 hat ja schon ein Beispiel genannt, in dem eine Regelung ohne “Zusatzinformationen” vom BMS quasi nicht durchführbar sind. Und bei einer solchen “intelligenten” Anbindung des WR wird auf deinen Standpunkt insofern Rücksicht genommen, daß diese von den “Vorgaben” für Ent/Ladestrom noch eine Sicherheitstoleranz abziehen. Temperatur ist hier ein ganz augenscheinliches Kriterium warum die Batterie nicht will was sie sonst nicht stört.
Auch der Terminus “Regelkreise” bedarf noch einer genaueren Definition. Zum einen regeln/begrenzen wir Ent/Ladeströme aber wie im Beispiel von @janvi kann das bis in den Bereich von EMS führen, Load/Charge Prediction, Variable Tarife, …
Notiz am Rande: Mein BMS korrigiert sogar Unzulänglichkeiten des WR ![]() Wenn dieser bei dauernder hoher Ladeleistung “zusammenbricht” wird der maximale Ladestrom heruntergeregelt. Eher unkonventionell aber auch ein Regelkreis ….
Wenn dieser bei dauernder hoher Ladeleistung “zusammenbricht” wird der maximale Ladestrom heruntergeregelt. Eher unkonventionell aber auch ein Regelkreis ….
Ein weiterer Regelkreis - die von der Batterie aktiv veranlasste 100% Ladung - ganz ohne Intervention durch den WR. Aber ohne Zweiwegkommunikation nicht möglich. Bei den 3 Buchstaben wird eine solche Top-Ladung wohl über eine App am WR initiiert. Die Batterie hat darauf meines Wissens keinen Einfluß.
Das steht alles oben. Redundanz, Zweikreisigkeit, BMS ohne Datenverbindung, schönes System zur Betriebsdatenführung, so wie du selber eigentlich dein System aufgebaut hast. FMEA. Pflichtenheft der Funktionen.
Niemand von euch hat sich darauf eingelassen. Ich habt mir alle erklärt warum eure Systeme genügen. Und warum sie mit einem Fehler fertigwerden.
Wobei ich bei dir nur von einem weiss: die Summe der Spannungen stimmt nicht. Ok, Watchdog für den Prozessor. Und ein paar andere Sachen.
Und was, wenn sie nicht mit dem Fehler fertigwerden? Habt ihr wirklich alle denkbaren Fehler in Betracht gezogen? Keinen übersehen?
Ich dachte an ein konkretes Schaltungsbild. Welche Sensoren werden doppelt vorgesehen - wie sieht die Steuerung des WR aus ? Du meinst ja das BMS ist nur für Sicherheitsabschaltung zuständig. Wer regelt den WR dammit es gar nicht zu einer solchen kommen muß ? Der hat dann wohl seine eigenen Temperaturfühler im Batteriegehäuse ???
Tja das habe ich im Kopf, müsste mal FMEA mässig zu Papier bringen ![]()
Erstmal Fehler zuverlässig erkennen. Damit fertig werden setzt voraus, daß die Sicherheitsabschaltung zuverlässig funktioniert. Bei mir wie auch in kommerziellen Batterien ein Hochvoltrelais entsprechend überdimensioniert.
Elektronischer Watchdog (Totmannschaltung) auch für die Sicherheitsabschaltung. Prozessor defekt → keine Ein/Aus Flanken mehr → Abschaltung
Hoffe nicht - vielleicht fällt dir ja noch etwas ein. Und hoffentlich sind kommerzielle Batteriespeicher entsprechend sicher - Bei den 3 Buchstaben habe ich leichte Bedenken aber es gibt ja Eaton-Sicherungen ![]()
edit: Es wäre auch interessant, eine VDE/ÖVE Prüfung für meine Batterie machen zu lassen - leider fehlt es hier in Ö an entsprechenden Prüfinstituten/institutionen.
Das kann doch jeder selber entscheiden.
Alle die du in deinem Gesamt system haben willst.
Nun wenn ich mir nochmals den Threadtitel vor Augen führe …. Ich denke der sollte geändert werden !
Vielleicht in “Relevante Regelkreise in einem Batteriesystem und wie sie zusammenarbeiten.” ![]()
Ich könnte viele Sensoren montieren, eh klar. Aber wie bekomme ich es hin, daß die restliche Anlage mit denen redet?
Und selbst wenn ich mir das in hardware und software selber zambasteln könnte: Dann habe ich ein BMS mit vielen Werten, und viele zusätzliche Sensoren. Mit dem BMS soll nicht geredet werden, also doch nur einfache Sicherheit?
Die Frage ist: Wie baut man eine wirklich sichere Batterie?
Interessante Diskussion, bei der ich auch noch nicht verstanden habe, warum man Messwerte des BMS nicht verwenden sollte. D.h. ich kann die Begründung nachvollziehen, teile aber die Schlussfolgerung nicht.
Es geht schon mit der Begriffsdefinition los. Das BMS ist demnach eigentlich historisch tatsächlich ein BPS. Von einem Management erwarte ich mehr als "Abschalten". Aus der Historie könnte man das aber auch erklären - in der Anfangszeit gab es vielleicht nicht mehr Anforderungen und der Begriff muss gut klingen. Ein SmartMeter ist alles andere als smart (in der Anfangszeit konnten die Dinger teilweise ja noch nicht mal ihre Kernaufgabe "[Wirkleistungs]messung" gut), die Auto-Starterbatterie ist heute auch für den Normalbetrieb unerlässlich, die ersten (und heutige einfache) Wechselrichter machen auch mehr als Wechselspannung (z.B. die ganzen Netzdienstleistungen/Sicherheit - 4105). Dazu kommt, dass ein Managementsystem nicht alles selbst machen muss. Warum sollte ein BMS nicht einem anderen System mit den entsprechenden Fähigkeiten sagen "bitte reduziere den Ladestrom". Spannend wird es erst - und da teile ich die Sorge von @carolus -, wenn der Client das nicht macht. Verlassen darf sich das BMS darauf eben nicht und muss entsprechend reagieren. Ein ganz normaler Regelkreis. Für den Client (WR bzw. Laderegler) gilt ähnliches. Wenn er schlimmstenfalls gar keine eigenen Messungen macht, muss er sich auf die Werte vom BMS verlassen. Wenn diese aufgrund eines Kommunikationsfehler nicht vorhanden oder unplausible sind wäre Abschalten eine gute Taktik. Eigene Messungen erhöhen auf den ersten Blick die Sicherheit, weil der Client die Messwerte vom BMS verifizieren bzw. plausibilisieren kann.
Wenn Gesamtspannung von Client und BMS zu sehr abweichen, ist das zumindest prüfenswert und der Client kann zeitnah überwachen, ob das nur bei Peaks oder dauerhaft auftritt. Peaks sind über Historisierung von verschiedenen Systemen nur schwer zu erfassen bzw. erfordern große Datenmengen.
Echte Redundanz habe ich hier noch nirgends gelesen, nur zwei Regelkreise mit unterschiedlichen Aktoren. Das BMS ist ein Zweipunktregler, der WR kann hoffentlich auch Zwischenwerte und ist dementsprechend komplizierter. Noch nicht mal BMS (MOSFET) und NH-Sicherung stellen aus meiner Sicht eine Redundanz dar sondern NH ist die Fallback Strategie für das BMS.
Mit doppelten Messungen hat man ein ganz neues Problem: Wenn die Messwerte abweichen (und das werden sie), welcher gilt? In der Industrie löst man das in den sicherheitsgerichteten Steuerungen mit 2aus3 Messungen, aber selbst da gibt es keine absolute Sicherheit. Wenn ich mich an eine Doku über Flugzeugabstürze erinnere - ist der Stealth Bomber nicht sogar trotz Mehrfach (Redundanz) Messungen abgestürzt, weil alle Messungen falsch waren? Man ist ganz schnell beim Problem Ausfallsicherheit vs. Anlagen-/Personensicherheit. Die sichere Variante: Nimm alle Messwerte, die du irgendwie kriegen kannst und schalte ab, sobald einer davon eine unsichere Situation anzeigt.
Ich bleibe noch bei der Industrie, auch da werden von der sicherheitsgerichteten Steuerung (hier das BPS/BMS) Messwerte an das Regelsystem (Prozessleitsystem) weitergegeben, damit dieses nicht z.B. Ventile zu öffnen versucht, wenn es das nicht darf. Früher waren solche Signale ausschließlich hard-wired (extra Kabel), inzwischen geht das zunehmend über Bussysteme. Wenn Abschaltugen darüber nicht zuverlässig funktionieren würden, hätte das im Fehlerfall Auswirkungen auf mehr als ein EFH. Wobei es hier schon oft einen zweiten Kreis (Druckluft - Pilotventil) gibt. Ob das Leitystem eigene Messungen oder die 2aus3 Messung des Sicherheitssystems für die Regelung verwendet, ist nicht nur eine Kostenfrage. Jeder Sensor muss kalibriert und gewartet werden.
Zurück zum BMS. Wo soll der WR die Gesamtspannung messen? Für die Lade- und Entladespannung bräuchte man einen Sensor direkt an den Batteriekontakten, weil die Spannung am WR bei hohen Strömen niedriger sein dürfte. Also ev. schon mal zwei zusätzliche Leitungen. Dann die Zellenspannungen, mind. 17 Messleitungen aus der Batteriebox raus. Plus mind. 1 Temperaturmessung. Alles mit den entsprechenden Messfehlern und in der Hoffnung, dass sich die Zellspannungsmessungen nicht gegenseitig beeinflussen und vom Balancing gestört sind. Selbst wenn man diesen Aufwand für die Sicherheit treibt, wäre es meiner Meinung nach fahrlässig, diese Werte nicht mit denen vom BMS zu zu vergleichen und auf Abweichungen zu reagieren. Für eine erhöhte Fehlersicherheit würde es sich anbieten, unterschiedliche Messmethoden/-größen einzubeziehen. Ich weiß z.B. nicht, ob das BMS die Zellspannungen über Differenzen bildet (jeden Input gegen Minus messen, die Differenz zwischen zwei nebeneinanderliegenden Messungen ergibt die Zellspannung) oder wirklich einzeln misst. Die Gesamtspannung könnten auch durch Summe der Einzelspannungen oder über eine extra oder über die letzte Messung ermittelt werden.
Aus meiner (theoretischen) Sicht ist die Frage, ob man Messwerte vom BMS im Regelkreis verwendet, deshalb eine untergeordnete Frage. Zusätzliche Messungen machen es ungemein komplizierter aber nicht automatisch auch sicherer, denn auch lokal durchgeführte Messungen können ausfallen. Kritisch ist das Verständnis, wie die Messwerte entstehen, wie verlässlich sie sind und was die Fallbackstrategie ist. Kommunikation darf die zentrale Funktion nicht stören (unabhängige CPU). Einen ESP oder Rasperry würde ich nie für kritische Anwendungen verwenden. Sowohl BMS als auch WR müssen unabhängig in der Lage sein, mit ihren Möglichkeiten abzuschalten. Um die Betrachtung verschiedener Aspekte und Fehlerfälle kommt man in keiner Variante herum. Hohe Abtastraten sind nocht immer von Vorteil, das hängt auch wieder von der zu messenden Größe ab.
Das kann man eingeschränkt auch auf die SoC Frage übertragen - man muss verstehen, wie gemessen wird und unter welchen Umständen man auf diese Messung vertrauen kann oder auch nicht.
Ich habe kein System, kann aber garantieren, dass niemand alle denkbaren Fehler in Betracht gezogen haben wird. Da ist Software im Spiel und es gibt keine 100% fehlerfreie Software. Du hast selbst Flugzeuge ins Spiel gebracht - auch die stürzen trotz aller Redundanz hin und wieder ab ![]()
Oh da wird sich mein ESP32 nicht freuen. Ich sehe jetzt keinen Unterschied zur e.g: ARM Architektur (e.g: STM32F40x) nur, daß der ESP32 zwei Cores hat und bis zu 240MHz getaktet wird. Mein erstes Design zielte auch auf STM32 ab (lief prima alles interrupt-driven), aber Wifi in the box war mir dann lieber. Raspberry ist vielleicht eine andere Nummer, kenne ich nur mit Linux obwohl man den vermutlich auch hardwarenah programmieren könnte.
Soviel ich weiß werden die Zellspannungen üblicherweise einzeln gemessen (e.g: LTC68xx). Meines wissens findet auch in den bei mir zur Zellmessungen verwendeten JK-BMS eine Einzelmessung statt.
Gut, ESP nehme ich zurück, hängt von der Firmware ab. Wenn der Kommunikationsteil (WiFi) den Hauptprozess nicht stört bzw. die Interrupts sicher funktionieren, fehlt mir das detaillierte Programmierwissen, um dagegen argumentieren zu können (wenn ich das wollte). Bei WiFi und kritisch stellen sich mir reflexartig die Nackenhaare auf und es kursiert halt auch viel Halbwissen, die Bastelei ist zu einfach geworden. Ich habe kaum ESP bzw. weitestgehend vorgefertigte Software verwendet und da hängt es schon manchmal. Das mag aber auch an der Spannungsversorgung oder den verwendeten Libraries liegen.
Hardwareseitig hängt es von der Beschaltung ab, auf die internen Schutzschaltungen würde ich mich ebenfalls nicht verlassen wollen.
Bei den Messungen macht es vermutlich auch einen Unterschied, ob man selbst baut oder fertige Module kauft. Für die eigene Verwendung und geringe Stückzahl ist man schnell bereit 10EUR für deutlich bessere Mess-IC (sorry für den Begriff) auszugeben. Wenn man sich allgemein ansieht, wo wegen wenigen Cent Ersparnis erhebliche Kompromisse eingegangen werden, gehe ich davon aus, dass die auch bei BMS der Fall ist. Im Normalbetrieb tut es die billige Variante ja auch.
Keine Frage mir auch ! Aber ich verwende Wifi nur zur Datenauswertung über MQTT. Auch Bluetooth lehne ich für kritische Anwendungen ab.
Nun ich hatte anfangs einen anderen Plan aber verwende jetzt JK-BMS über RS485/Modbus angebunden. Die Spannungsmessungen scheinen korrekt zu sein und werden gegen die gemessene Systemspannung auf Plausibilität geprüft. Daß sich die Genauigkeit wesentlich verschlechtert und eine Zelle so in den Ruin treibt, halte ich für unwahrscheinlich.
In diesem Aspekt unterscheiden sich europäische Hersteller und chinesische nicht wirklich. Mein BMS ist selbst gelötet - erfüllt sicher keine strengen Kriterien aber bei Fehlfunktion reicht es zum Relais abschalten ![]()
Edit: ad ESP - naja wenn ich “Arduino”-Library höre stellen sich bei mir die Nackenhaare auf ![]()