versuche schon seit mehreren Tage das Plugin zum laufen zu bekommen.
Habe es lt Anleitung GitHub “Herr Manuel” installiert und lt Konsole auch erfolgreich durchgeführt.
Alles läuft auf einem RasPi4 mit Waveshare RS485 CAN HAT Modul.
Nach Neustart des RasPi finde ich aber keinen Hinweis/Menü über eine CAN Schnittstelle.
Habe ein JKBMS aber dies ist noch nicht angeschlossen.
Was mach ich falsch? Habe schon unzählige Foren durchgelesen, aber leider keine Lösung gefunden. Auch wenn ich “tail -F -n 100 /data/log/dbus-serialbattery.ttyUSB0/current | tai64nlocal” durchlaufen lasse,bekomme ich die Meldung “not such a directory” als ob nichts installiert wäre!
Du sagst du hast ein CAN HAT in Verwendung. Ist das CAN HAT korrekt installiert? Mit dem obigen Konsolenbefehl sollen Informationen zum USB0 ausgegeben werden, wenn aber gar kein USB Gerät verwendet wird gibts dazu auch keine Infos in der Konsole.
Wenn das CAN HAT korrekt installiert ist, dann sollten dir in der Remote-Konsole (V2 UI) folgende Infos angezeigt werden wenn denn auch mindestens ein BMS angeschlossen ist:
Verstehe ich es richtig, daß wenn ich noch kein BMS angeschlossen habe, ich in der Remote Konsole dann auch keine Infos über einen CAN Port angezeigt werden!?
Es wird bei mir nichts angezeigt, daß ist ja mein Problem
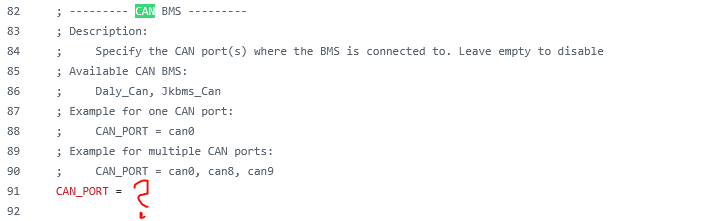
Muss ich dien Config.ini selbst befüllen oder geschieht dies autom. oder gibts es eventuell Vorlagen?
Komisch ist aber wenn ich “nano /config.ini.default” in die Konsole eintrage, sehe ich nur eine leere Datei. Aber hier sollte doch die ganzen Einstellungen stehen oder?
Bin recht neu in dem Thema und es gibt soviele Tutorials , daß man irgendwann mehr Fragen als Antorten hat. Mich interessiert dieses Thema aber sehr und würde die Grundlagen verstehen.
Wollte bevor meine Batterie fertiggestellt ist, schon den RasPi einrichten, aber das muss dann wohl warten.
Ist eine CAN HAT mit galvanischer Trennung besser geeignet oder reicht der “normale” ohne galv. Trennung.
Ich muss zugeben, die github Seite ist manchmal etwas unübersichtlich. Aber schau dir das hier noch mal an:
Deine Konsolenbefehle sind nicht korrekt.
Auf jeden Fall mit galvanischer Trennung! Ansonsten kann es passieren dass der Lastkreis sich den GND über den CAT HAT holen möchte (z.B. wenn das BMS aus welchem Grund auch immer trennt) und dann ist die Steuerungstechnik dahin.
Schau mal bei YT nach Offgrid Garage. Der Andy beschreibt in einem seiner Videos ganz gut wie man das CAN HAT einrichtet und prüft ob die Einrichtung I.O. ist. Das entsprechende Video jetzt gerade nicht so schnell…
Soll jetzt keine Schleichwerbung sein, aber ich setze diesen CAN HAT ein, funktioniert tadellos:
Ok dann werde ich mir den mit der Trennung bestellen, aber nochmals auf meine Frage
Verstehe ich es richtig, daß wenn ich noch kein BMS angeschlossen habe, ich in der Remote Konsole dann auch keine Infos über einen CAN Port angezeigt werden!?
Ist es so oder muss es auch ohne angeschlossenes BMS in der Remote Console angezeigt werden?
Das kann ich dir leider nicht beantworten. Nachdem bei uns das VenusOS auf dem Raspi4 samt CAN HAT lief hab ich es nie eingeschaltet ohne das gleich ein CAN Busteilnehmer dran war. Da die Anlage jetzt im Produktivbetrieb läuft kann ich das auch nicht mehr testen